Calcul de la trajectoire du navire. Solution directe au problème
), qui permet d'aller directement à la solution des problèmes de navigation appliqués à la plaisance. Dans cette série d'articles, nous allons apprendre à calculer la route du navire, à la tracer sur une carte marine, et encore, à nous familiariser avec de nouveaux concepts. Eh bien, comment cela pourrait-il être sans cela (je parle de concepts). Pour assurer une navigation en toute sécurité, le skipper doit clairement naviguer dans l'environnement et connaître clairement la place de votre bateau. Afin de résoudre ce problème, des constructions graphiques sont effectuées sur la carte, reflétant la direction du chemin, les valeurs des caps de la boussole, les valeurs des relèvements et distances pris, des calculs pour une divergence sûre par rapport au détecté objets, etc... L'ensemble du complexe de telles constructions s'appelle un pavé de navigation.
Avant le début de la transition, le plaisancier étudie l'ensemble des conditions de navigation dans la navigation à venir et met sur la carte l'itinéraire proposé de la transition et des informations supplémentaires (monte la carte). Il s'agit d'une pré-couche.
Dès le départ du yacht, l'équipe de navigation commence à tenir un compte rendu attentif des éléments de mouvement, des caps, des vitesses, des dérives par rapport à la trajectoire prévue. Le navigateur sur un yacht est généralement compris comme le capitaine. Qui d'autre, il est à la fois faucheur et sur le tuyau .., eh bien, vous comprenez. Bien qu'il y ait parfois des membres d'équipage compétents (et non des autorités) sur le bateau qui peuvent effectuer cette tâche. Cependant, j'ai dévié, retour à notre .., comptabilité. L'emplacement du navire, les éléments d'influence des facteurs externes (dérive du vent et courant) sont déterminés et reportés sur la carte. Il s'agit d'un joint exécutif.
Lorsque la position exacte d'un yacht n'est pas déterminée par des moyens de navigation ou autres, elle est tracée sur la carte en utilisant les valeurs du parcours qu'il suit, les paramètres environnementaux (le cas échéant) et la vitesse. C'est la méthode de l'estime. L'estime elle-même est faite en continu pendant toute la traversée et ses données sont corrigées, si nécessaire, lorsque le plaisancier reçoit une place observable. Le système numérique lui-même est de deux types - graphique et analytique.
Calcul analytique de la trajectoire du navire.
Le calcul analytique de la trajectoire du navire implique le calcul des coordonnées de l'emplacement du yacht à l'aide de formules et de données connues et son traçage ultérieur sur une carte. Cette méthode d'estime est principalement utilisée en navigation océanique, lors de l'utilisation de cartes à petite échelle. Dans la plaisance moderne, ce système de navigation à l'estime n'est pas très demandé, ils y sont engagés, à l'heure actuelle, uniquement par des navigateurs professionnels, GPS pour les aider. Par conséquent, nous ne le considérerons pas dans cet article. Mais nous analyserons plus en détail le calcul graphique de la trajectoire du navire, d'autant plus qu'il est intuitif et permet même à un plaisancier novice de déterminer dans l'espace sans électronique (pah-pah-pah).
Calcul graphique de la trajectoire du navire.
La méthode de calcul graphique de la route du navire consiste à tracer les lignes de route sur la carte avec l'indication des caps et d'autres données, en tenant compte de la dérive (si ses paramètres sont connus). L'essence de la différence entre ces deux systèmes à l'estime est qu'avec l'estime analytique de la trajectoire du navire, le complexe de constructions graphiques ci-dessus n'est pas exécuté, et il est donc difficile à maîtriser pour un large éventail de plaisanciers amateurs. Et qui veut s'asseoir dans un siège de navigateur exigu et faire de l'arithmétique. Que les affaires soient engagées dans le même, le même emploi, mais en dessinant des lignes et des flèches fascinantes sur une carte. L'essentiel est de ne pas trop se laisser emporter par le dessin et de ne pas gâcher la carte, indispensable en yachting.
La position du navire, obtenue uniquement à la suite d'une méthode d'estime, est appelée position à l'estime. Arrêtons-nous sur le concept d'estime de la trajectoire du navire. Pour commencer, supposons qu'aucun facteur extérieur (ni dérive, ni courant) n'agisse sur le yacht. Il est alors clair que la trajectoire du navire suivra la ligne de sa route et qu'il parcourra pendant un certain laps de temps une distance égale au produit de sa vitesse par la valeur de ce laps de temps.
La trajectoire du yacht, tracée sur la carte, s'appelle l'angle de route. Sur la ligne du chemin des yachts, la distance parcourue par le bateau est reportée. Cette distance peut être théoriquement déterminée en multipliant la vitesse par le temps, mais en pratique, elle est supprimée des lectures de décalage, car. le loch compte exactement la distance parcourue, et il « calcule » déjà la vitesse. Au point de départ du calcul graphique de la trajectoire du navire, la lecture du temps et du décalage (T1 et OL1) est notée, sous la forme d'une fraction dont le numérateur est le temps (avec une précision pouvant aller jusqu'à la minute ), et au dénominateur est la lecture du décalage (avec une précision de 0,1 mile nautique). Ces données sont reportées sur la carte à proximité de chaque lieu compté (s'il y a une observation, au lieu observé). La route du navire est tracée à partir du point de navigation à l'estime. Par rapport à ce point, d'autres calculs et constructions sont effectués. La fréquence de tirage des points calculés et observés est déterminée par la décision du capitaine, en fonction des conditions et de la complexité de la plaisance.
Calcul à l'estime de la trajectoire du navire, résolution de problèmes graphiques.
Maintenant que nous nous sommes un peu familiarisés avec l'estime et la pose, nous pouvons passer à la solution directe des problèmes graphiques. Alors, commençons. Selon les coordonnées disponibles, nous mettons sur la carte un lieu comptable à partir duquel nous procéderons à une pose ultérieure (il peut également s'agir d'un lieu observé, il n'y a pas de différence fondamentale, seules les désignations sont différentes).
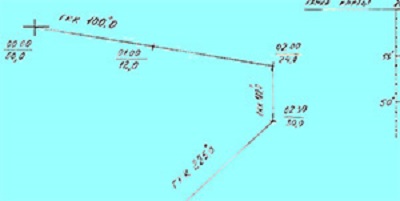
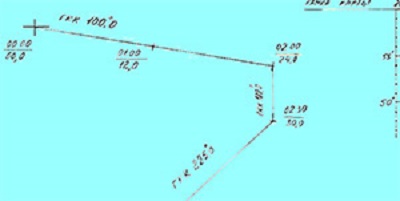
Dans ce cas, supposons que nos données initiales soient : temps initial 00.00 ; décalage initial lecture 00.0 ; vitesse du navire - 12 nœuds. Il est clair que dans le yachting pratique, personne ne marche à une telle vitesse, mais n'oublions pas "nos petits frères" - les yachts à moteur. Et de tels calculs sont pertinents pour eux. Malgré le fait qu'ils sont privés d'un élément important du véritable yachting - les voiles, en mer, ils sont exposés aux mêmes facteurs que les voiliers.
 Nous posons une ligne de parcours à partir de ce point, en utilisant une règle parallèle et un rapporteur de navigation. Soit le cap initial à 100°, le courant et la dérive ne nous sont pas encore connus, et ne sont donc pas pris en compte. Et n'oubliez pas de traduire la valeur de la boussole du cap tiré de la boussole du navire en vrai. Passe d'une heure de plaisance. Il sera 01h00. Le nombre de retards est de 12,0. Marquons ce point dénombrable sur la carte à 01.00. De plus, dans une autre heure, nous devrons nous tourner vers un nouveau cap - 180 °. Mais pour l'instant, nous ne marquerons le point qu'à 01h00.
Nous posons une ligne de parcours à partir de ce point, en utilisant une règle parallèle et un rapporteur de navigation. Soit le cap initial à 100°, le courant et la dérive ne nous sont pas encore connus, et ne sont donc pas pris en compte. Et n'oubliez pas de traduire la valeur de la boussole du cap tiré de la boussole du navire en vrai. Passe d'une heure de plaisance. Il sera 01h00. Le nombre de retards est de 12,0. Marquons ce point dénombrable sur la carte à 01.00. De plus, dans une autre heure, nous devrons nous tourner vers un nouveau cap - 180 °. Mais pour l'instant, nous ne marquerons le point qu'à 01h00.
Le moment est venu 02.00. Et nous, comme nous en avions besoin, avons tourné sur un cap à 180°. A partir du point correspondant à notre point dans le temps, nous traçons simplement un nouveau cap. Dans le même temps, nous n'effectuons toujours qu'un calcul graphique de la trajectoire du navire. Nous n'avons pas de réservations. Dans une autre demi-heure nous prendrons un nouveau cap au 225°. Et maintenant, notre nombre de décalages est de 24,0. Calculons la distance que nous devons tracer sur la ligne de parcours afin d'obtenir un point dénombrable.
ROL (différence de comptage de décalage) \u003d 24 - 12 \u003d 12 - réservez 12 milles marins.
 N'oubliez pas d'écrire la valeur du cours au-dessus de la nouvelle ligne de cours. Dans une demi-heure, il sera 02h30 et le décalage sera de 30,0. La distance en attente est à nouveau calculée, comme indiqué ci-dessus :
N'oubliez pas d'écrire la valeur du cours au-dessus de la nouvelle ligne de cours. Dans une demi-heure, il sera 02h30 et le décalage sera de 30,0. La distance en attente est à nouveau calculée, comme indiqué ci-dessus :
ROL \u003d 30 - 24 \u003d 6 - réservez 6 milles marins, marquez notre point de calcul et tracez un nouveau cap.
Maintenant, supposons que nous soyons en mesure de localiser l'emplacement de notre yacht, nous ferons une observation dans 15 minutes. En conséquence, le point temporel sera 02h45 et le nombre de décalages sera de 33,0.
Oops! Et notre point observé ne coïncide pas avec le chiffre un. Qu'est-ce que cela signifie dans notre méthode d'estime ? Et vous ne pouvez pas vraiment le dire tout de suite. Tout n'est pas si simple dans le yachting.
Nous ne pouvons que supposer que nous avons déterminé par erreur l'emplacement du yacht ou qu'il est affecté par le courant ou la dérive du vent.
Plus précisément, nous ne pourrons juger de la cause de l'écart qu'en disposant de plusieurs observations. Nous analyserons leur position par rapport aux points dénombrables et verrons quoi et comment. Pour ce faire, nous continuerons à effectuer des déterminations de localisation toutes les 15 minutes. Dans la figure de notre pose, les points dénombrables et ceux observés à côté d'eux seront visibles.
Notez qu'il n'y a pas de ligne ondulée (écart) entre les points calculés et observés. Cela signifie que nous n'avons pas pris en compte l'observation et continuons à effectuer un calcul graphique de la trajectoire du navire, en supposant notre place sur la ligne de route tracée. Cela ne signifie pas que l'observation elle-même soit remise en question. Juste le temps que nous réfléchissions, et les circonstances de la plaisance nous permettent de ne pas tenir compte pour l'instant du point observé. Lorsque nous naviguons, par exemple, dans des conditions exiguës, nous déterminons constamment la place du navire et nous nous orientons par des observations. Mais plus là-dessus plus tard.
 Revenons à notre carte. On voit que les points observés sont de plus en plus éloignés des nombres. C'est déjà un système. On cherche les raisons, on procède à l'analyse. La première chose à laquelle nous devons prêter attention est de savoir si nos points sont situés le long d'une ligne droite ou courbe. Si le long d'une courbe (une sorte d'hyperbole, par exemple - mais, surtout, le long d'une courbe régulière), alors nous avons tout à fait le droit de croire que le point de repère utilisé pour déterminer la place du yacht dans notre méthode d'estime est incorrect identifié par nous et nous, en prenant les valeurs des paramètres de navigation (relèvements et distances, par exemple) d'un point de repère, sur la carte nous les écartons d'un autre. Dans ce cas, il est nécessaire d'identifier immédiatement le ou les repères par tous les moyens disponibles. (N'oubliez pas le contrôle par GPS). Si nos points sont situés en ligne droite, cela signifie qu'un facteur externe (et, de plus, linéaire) agit sur le yacht.
Revenons à notre carte. On voit que les points observés sont de plus en plus éloignés des nombres. C'est déjà un système. On cherche les raisons, on procède à l'analyse. La première chose à laquelle nous devons prêter attention est de savoir si nos points sont situés le long d'une ligne droite ou courbe. Si le long d'une courbe (une sorte d'hyperbole, par exemple - mais, surtout, le long d'une courbe régulière), alors nous avons tout à fait le droit de croire que le point de repère utilisé pour déterminer la place du yacht dans notre méthode d'estime est incorrect identifié par nous et nous, en prenant les valeurs des paramètres de navigation (relèvements et distances, par exemple) d'un point de repère, sur la carte nous les écartons d'un autre. Dans ce cas, il est nécessaire d'identifier immédiatement le ou les repères par tous les moyens disponibles. (N'oubliez pas le contrôle par GPS). Si nos points sont situés en ligne droite, cela signifie qu'un facteur externe (et, de plus, linéaire) agit sur le yacht.
Autrement dit, soit le vent nous emporte, soit le courant, soit les deux. Et comment le définir ? Fondamentalement, c'est facile. En yachting, on trouve toujours une issue. Il y a deux règles importantes à retenir ici :
Le log prend en compte la dérive (pour les petits angles de dérive).
Le courant de retard n'est pas pris en compte.
Si vous n'êtes pas trop intelligent, cela ressemble à ceci. On mesure sur la carte les distances entre deux points dénombrables et ceux observés qui leur correspondent dans le temps. Si ces distances sont égales, alors nous avons affaire à une dérive. Lag s'en fout, il tient compte de la dérive. Qu'il n'y ait pas de dérive, qu'il y en ait, le décalage de distance indique (si, bien sûr, il est utilisable) relativement correctement.
C'est juste dans notre cas, c'est-à-dire que nous dérivons. Mais si les distances entre les paires de nombres et les points observés qui leur correspondent diffèrent, et que la grandeur de cette différence est constante, nous sommes sans doute confrontés à l'action du courant.
Mais pour ne pas surcharger cet article et le cerveau d'un lecteur attentif, nous parlerons de l'influence de la dérive et du courant sur l'estime du navire plus tard, dans.
Basé sur le livre "Fundamentals of Navigation" de A.E. Seleznev
Objectif et types de calcul. Principaux objectifs,
Résolu sur la carte
L'estime est la réception à tout moment de la position du navire par son mouvement à partir du point pris comme point initial.
L'estime est la base de la navigation de navigation (instrumentale). Les assistants du capitaine sous son contrôle pendant toute la durée du voyage continuent de compter sur le quart. Ils commencent à compter dès la sortie du port ou du mouillage et se terminent à l'arrivée du port de destination sur la rade. Le lieu et l'heure du début et de la fin de l'estime sont fixés par le capitaine. Le point de départ est considéré comme la position la plus précise du navire qui peut être obtenue dans les conditions données. Si une erreur de calcul importante est constatée en navigation, alors le transfert vers un nouveau point de départ et la modification des éléments de mouvement pris en compte se font également au su du capitaine.
La place du navire sur la carte obtenue par calcul et ses coordonnées j c, l c sont dites calculables. Une ligne horizontale est tracée près d'un tel point, au-dessus de laquelle l'heure du navire (heures, minutes) est inscrite, et sous le décompte du décalage (miles sans centaines, dixièmes).Si le décalage ne fonctionne pas, placez un tiret en dessous.
Gardant l'essence du calcul, il est divisé en trois types : graphique, analytique et automatique. Indépendamment de cela, si nécessaire, ils stipulent quelles conditions sont prises en compte - dérive, écoulement, circulation.
Des points dénombrables sont censés être mis sur la carte avec tout changement de cap et de vitesse du navire, avec d'autres changements dans les conditions de navigation, ainsi qu'avec tous les événements enregistrés dans le journal de bord. Si le cap et la vitesse sont inchangés, alors lors de la navigation le long de la côte, des points dénombrables sont tracés sur la carte toutes les heures, et lors de la navigation en haute mer (dans l'océan) - après quatre heures lors du changement de montre.
Habituellement, la place comptabilisable se trouve au moment actuel du temps du navire. Tantôt il s'agit de retrouver la place estimée estimée à un moment donné du futur, ou, au contraire, il faut restituer la place estimée lors de quelque incident du passé. Des problèmes de nombres similaires et autres peuvent être résolus graphiquement ou analytiquement.
Pour la solution graphique de diverses tâches de navigation, un compas de mesure, une règle parallèle et un rapporteur de navigation sont utilisés.
Le compas de mesure est utilisé pour mesurer et tracer des distances sur une carte. Les distances sont mesurées en miles nautiques. L'échelle est le cadre latéral (vertical) de la carte opposé à l'endroit où la mesure est effectuée. Une minute de cette échelle équivaut à un mille marin.
La règle parallèle est utilisée pour tracer des lignes droites sur la carte qui sont parallèles à une direction donnée. Il se compose de deux règles reliées par des tiges métalliques sur charnières. Une telle connexion vous permet de déplacer la règle, tout en conservant une direction donnée, ce qui est nécessaire lors de la pose de lignes de parcours et de relèvements. La boussole de dessin habituelle est également utilisée, à l'aide de laquelle des arcs sont dessinés sur la carte - lors de la détermination d'un lieu en fonction des distances par rapport aux objets côtiers.
Un rapporteur de navigation est nécessaire pour tracer et mesurer des angles sur une carte. C'est un demi-cercle gradué avec une règle centrée au point "0". Les divisions de degrés sont marquées sur son arc extérieur. Les traits de divisions, multiples de cinq degrés, sont allongés. Contre les traits marquant les dizaines de degrés, deux nombres diffèrent de 180°. Les chiffres supérieurs correspondent aux directions de la moitié nord de la rose des vents et les chiffres inférieurs correspondent à la moitié sud. Pour tracer une ligne sur la carte à un certain angle par rapport au méridien, il est nécessaire d'imposer un rapporteur sur la carte afin que le trait central "0" et la ligne sur l'arc, indiquant un nombre de degrés donné, coïncident avec la ligne méridienne. Ensuite, la ligne tracée le long de la coupe supérieure de la règle dans la direction correspondante donnera la direction souhaitée.
Lors de la pose, il est nécessaire de résoudre les tâches principales suivantes:
1) supprimer la latitude et la longitude du point donné de la carte ;
2) pour la latitude et la longitude données, tracer un point sur la carte ;
3) tracer un cap ou un relèvement à partir d'un point donné sur la carte ;
4) mettre de côté un certain nombre à partir d'un point donné dans une direction donnée
5) déterminer la direction du parcours ou relèvement tracé sur la carte ;
6) mesurer la distance entre deux points sur la carte marine ;
7) tracer un parcours sur la carte à partir du point de départ à une distance donnée de
ce sujet;
8) déplacer un point d'une carte à une autre.
1. Prenez la latitude et la longitude du point donné sur la carte. Ce problème est résolu à l'aide d'une boussole. En plaçant une aiguille de la boussole à ce point, écartez-la de sorte que la deuxième aiguille tombe sur le parallèle le plus proche. En traçant une partie du cercle avec un compas, assurez-vous que son aiguille touche le parallèle le plus proche en un seul point. Puis, sans changer la solution de la boussole, ils la transfèrent sur le côté du cadre de la carte et, appliquant une de ses aiguilles au même parallèle le plus proche, que la partie du cercle touchait, et l'autre, la dirigeant le long le cadre vers ce point, c'est-à-dire au N ou au S de ce parallèle, prendre la latitude correspondant à ce point.
Pour prendre la longitude, une aiguille d'une boussole est placée en un point donné et, l'ayant prolongée jusqu'au méridien le plus proche, la seconde aiguille décrit un cercle tangent au méridien. Puis sans changer la solution de la boussole, ils la transfèrent dans la partie inférieure ou supérieure du cadre de la carte et, après avoir attaché une de ses aiguilles au méridien auquel une partie du cercle tangent a été tracée, mettent la deuxième aiguille sur ce cadre dans la direction du point donné et enlevez la longitude.
La latitude et la longitude sont prises avec une précision de 0¢.1, si l'échelle le permet.
2. Sur la base de la latitude et de la longitude données, tracez un point sur la carte. Pour tracer un point sur une carte, on trouve sur le cadre latéral une division correspondant au nombre de degrés et de minutes d'une latitude donnée, et, en attachant une règle parallèle à la parallèle la plus proche de cette division, on décale la règle de sorte que une de ses tranches tombe sur une division d'une latitude donnée ; puis, dans le rectangle où devrait se trouver approximativement le point, une ligne est tracée entre les deux méridiens le long de la coupe de la règle. Après avoir trouvé une division sur la partie inférieure ou supérieure de la fenêtre cartographique correspondant au nombre de degrés et de minutes d'une longitude donnée du lieu, et avoir retiré le segment de cette division jusqu'au méridien le plus proche avec une boussole, poser ce segment sur le ligne tracée au crayon à partir du même méridien et obtenir le point recherché.
La même tâche peut être accomplie avec une seule règle. Pour ce faire, après avoir trouvé une latitude donnée sur le cadre latéral et appliqué une règle au parallèle le plus proche, amenez sa coupe à la latitude donnée, le long de laquelle une ligne courte est tracée avec un crayon dans le rectangle où se trouve le point souhaité. Puis, après avoir trouvé une division correspondant à une longitude donnée sur la partie inférieure ou supérieure du cadre cartographique, appliquer une coupe de la règle au méridien le plus proche et, en décalant la règle, amener une de ses tranches à la division d'une longitude donnée , le long de laquelle une ligne courte est également tracée. L'intersection de deux lignes tracées donne le point désiré.
3. Tracez une route ou un relèvement à partir de ce point sur la carte. Pour résoudre ce problème, utilisez un rapporteur et une règle. Avant de commencer à résoudre le problème, il est nécessaire d'imaginer la direction d'un cap ou d'un relèvement donné, c'est-à-dire dans quel quart de l'horizon se situera cette direction. Après avoir superposé le rapporteur avec la règle parallèle attachée sur la carte de sorte que la coupe inférieure de la règle soit approximativement dans la direction donnée avec le méridien, le rapporteur est tourné sans déplacer le trait central du méridien ni vers la droite ni vers la gauche jusqu'à ce que la division du rapporteur correspondant au cap donné coïncide avec la méridienne.
Après avoir obtenu une correspondance, le rapporteur est retiré et, après avoir amené une coupe d'une règle parallèle à un point donné, une ligne de parcours est tracée, en la dessinant avec un crayon le long de la coupe de la règle. Si la règle du rapporteur est située presque dans la direction du méridien à des parcours proches de zéro ou de 180 °, il est préférable d'appliquer le rapporteur au parallèle et de le régler à ± 90 ° sur la lecture du parcours donné.
Les inscriptions sur les divisions du rapporteur sont faites de manière à indiquer la direction du parcours ou du relèvement; de même avec des parcours dirigés vers N, ou vers le haut, les inscriptions correspondantes sur les rapporteurs sont en haut, avec des parcours ou relèvements dirigés vers S, ou vers le bas, les inscriptions sont en bas.
4. Mettez de côté un certain nombre de miles à partir d'un point donné dans une direction donnée. Lors de la résolution de ce problème, il faut se rappeler que le mille marin sur la carte Mercator est représenté par des segments de différentes longueurs, en fonction de la latitude.
La distance spécifiée est prise à l'aide d'une boussole sur le côté de la fenêtre cartographique à partir d'une latitude correspondant approximativement à la latitude du point donné. Cette distance est prise à N à partir de ce point si la route est dirigée vers N, ou à S si la route est dirigée vers S, et est mesurée à partir de ce point sur la route tracée ou la ligne de relèvement. Si la valeur d'une distance donnée ne peut être mesurée avec une solution d'un compas, alors cette distance est écartée par parties, et chacune des parties est prise à la latitude correspondant à cette partie.
5. Déterminez la direction du parcours ou du relèvement tracé sur la carte. Après avoir attaché la règle au parcours ou à la ligne de relèvement posée sur la carte et y avoir attaché un rapporteur, ils rapprochent la règle avec le rapporteur au méridien le plus proche, en combinant le trait central du rapporteur avec le méridien. La lecture sur le rapporteur donnera la valeur (en degrés et fractions) du cap ou du relèvement déterminé. Si la direction du cap ou du relèvement se trouvera dans les quarts NE ou NW, c'est-à-dire dans la direction vers N, alors la lecture supérieure est prise sur le rapporteur, si la direction est dans les quartiers SE ou SW, c'est-à-dire dans la direction de S, alors la lecture inférieure est prise.
6. Mesurez la distance entre deux points sur une carte marine. Lorsque vous mesurez la distance entre deux points, réglez une aiguille de boussole sur un point et l'autre sur le second, et mesurez la distance entre ces points. Ensuite, la boussole est transférée sur le côté du cadre et à la latitude correspondant à la distance mesurée, la distance parcourue par la boussole est déterminée.
Si la distance entre les points ne peut pas être supprimée avec une solution de boussole, elle est mesurée en parties - chaque partie à la latitude correspondante.
7. Tracez un parcours sur la carte à partir du point de départ à une distance donnée de cet objet.
Pour résoudre ce problème, un nombre donné de miles est retiré du cadre latéral de la carte, dans la partie de celui-ci qui tombe contre un sujet donné.
Ils placent l'aiguille de la boussole sur la carte à un point correspondant à l'endroit de l'objet donné, et décrivent l'arc avec le crayon de la boussole.
À partir du point de départ, tracez une tangente au cercle circonscrit.
8. Déplacez un point d'une carte à une autre.
Cette tâche peut être résolue de deux manières :
prendre la latitude et la longitude d'un point donné sur une carte et les utiliser pour tracer un point sur une autre carte ;
prendre sur une carte le relèvement vrai d'un objet tracé sur les deux cartes, et, après avoir mesuré la distance de cet objet à un point donné, tracer le relèvement vrai supprimé sur l'autre carte et tracer la distance mesurée à partir de l'objet sur la ligne de relèvement , en le prenant sur une échelle des secondes cartes.
comptabilité du vent
Le calcul graphique (pose) consiste en des calculs et des constructions sur la carte, qui doivent refléter le plus précisément possible le mouvement du navire.
Une pose simple à cap constant, lorsqu'il n'y a ni vent ni courant, est la suivante (Fig. 1.15). Sur la carte, à partir du point initial (précédemment dénombrable ou observé) M o , une ligne du chemin prévu est tracée et le parcours vrai du CI qui lui correspond est mesuré avec un rapporteur. Au-dessus de cette ligne (elle coïncide avec la ligne de cap dans de telles conditions), le cap selon la boussole principale est inscrit, et entre parenthèses - son amendement. Ces cap et correction sont arrondis à un demi-degré afin que leur somme algébrique donne l'IR (sur la Fig. 1.15 IR \u003d 67,5 °).
Selon la différence de lectures du décalage rol pour le point dénombrable souhaité M c et pris comme M o initial (sur la Fig. 1.15 rol \u003d 62,5), la navigation du navire le long du décalage S \u003d V·rol est calculé à l'aide des formules. Ce voyage est reporté à l'échelle de la carte le long de la ligne de route et on obtient une place comptable M s . Un tel endroit est indiqué par un tiret sur la ligne de route et, comme toujours, le temps du navire et le compte à rebours du décalage sont inscrits. Bien sûr, sur la carte, ils ne mettent pas ceux de la fig. 1.15 désignations IK, M o, S l et M s.
Le navire est situé à la frontière entre l'air et l'eau. Lorsque le navire se déplace, le mouvement des masses d'air (vent) le dévie de la route prévue et modifie sa vitesse ; de plus, le vent sépare la vague (ce qui fait embarder le navire) et crée un courant de dérive.
Le vent tire son nom du point à l'horizon d'où il souffle.
Si, par exemple, le vent souffle du NE, alors il s'appelle NE.
Il est d'usage de dire : le vent "souffle dans la boussole" UN le navire "vient de la boussole".
L'angle entre la direction du vent et l'axe du navire est appelé cap du navire par rapport au vent. Si le vent souffle à tribord, on dit que le navire est tribord amure. Si le vent souffle à bâbord, alors ils disent que "le navire est bâbord amure".
Lorsque l'angle entre le plan médian du navire et la ligne des vents est inférieur à 8 rhumbs, ou, à peu près au même, inférieur à 90°, alors on dit que « le navire est sur une route halée », tout en ajoutant le nom de le virement de bord : « cap tribord amure levé » ou « cap au plus près bâbord amure ».
Sous forme abrégée, le tack gauche est noté l / g., Et le tack droit - p / g.
Un parcours au plus près peut être raide et plein.
Une route au plus près sera lorsque l'angle entre l'axe du navire et la direction du vent est inférieur à 6 points. Si cet angle est supérieur à 6 points, alors dans ce cas, le parcours est appelé plein parcours.
Lorsque l'angle entre le plan diamétral du navire et la ligne du vent est de 8 points, soit 90 °, le cap du navire est appelé golfe ou demi-vent (Fig. 1.16.).
Lorsque l'angle entre le plan médian du navire et la ligne du vent est supérieur à 8 points, mais inférieur à 16 points, la trajectoire par rapport au vent est appelée galhauban (Fig. 1.16).
Lorsque le vent souffle directement dans la poupe, la route du navire est appelée empannage.
Lorsque le vent souffle directement dans la proue du navire, on dit : « le vent souffle droit devant » ou « le navire va contre le vent » (leventik).
Pendant le parcours du navire, un jet d'eau subsiste derrière sa poupe, appelé le sillage. Aux caps d'empannage ou de vent de face, le plan diamétral du navire coïncide avec le sillage.
Aux autres caps, le navire dérive sous le vent; une telle dérive est appelée dérive. Lors de la dérive, le plan diamétral fait un angle avec le jet de sillage, appelé angle de dérive (Fig. 1.17.).
Ainsi, l'angle de dérive a est l'angle formé par le plan diamétral du navire avec la direction dans laquelle il se déplace réellement en présence de vent (track-dérive ou angle de route avec dérive PU a)
Les voiliers dérivent le plus sur les parcours au près. Les navires à moteur mécanique, au contraire, ont la plus grande dérive à mi-parcours, c'est-à-dire lorsque le vent souffle perpendiculairement à la planche.
En général, l'ampleur de la dérive dépend de divers facteurs. Par exemple, plus le franc-bord est grand, plus le tirant d'eau du navire est faible et plus le vent souffle fort, plus la dérive du navire est importante.
Un navire à fort tirant d'eau, dans des conditions égales, aura moins de dérive qu'un navire à faible tirant d'eau.
La quantité de dérive sur les voiliers peut atteindre jusqu'à 1-2 points et même plus. Avec une grande course, la dérive sera moindre qu'avec une petite course.
La valeur de dérive peut être déterminée à l'aide du cercle d'azimut du compas, pour lequel le radiogoniomètre est réglé dans la direction du sillage, obtenant ainsi sur le cercle d'azimut l'angle entre le plan médian du navire et la ligne de son mouvement, dans certains cas, des formules sont utilisées, mais la mesure la plus fiable de l'angle de dérive est obtenue par des observations.
Comme on peut le voir à partir des définitions de la Fig. 1.18, juste
![]() .
.
Cependant, la tâche principale est de suivre la ligne du chemin prévu. Pour ce faire, avec l'avènement de la dérive, il est nécessaire de modifier le cap d'un angle a dans la direction du vent, comme on dit, "prendre face au vent". Dans ce cas, par la formule on trouve
![]() .
.
Le cap vrai résultant est converti en un compas KK = IR - DK et réglé sur le barreur ou installé sur le pilote automatique.
Le calcul, tenant compte de la dérive, est effectué le long de la piste, reportant la navigation S l sur celle-ci, désignant et inscrivant des points dénombrables comme dans la pose la plus simple. Pour obtenir la position du navire sur le faisceau de n'importe quel repère, son relèvement PI ^ = IR ± 90 ° est effectué par une encoche sur la ligne de voie.
L'inscription sur la carte au-dessus de la ligne de piste est faite, comme indiqué sur la Fig. 1.18 en supposant que la somme algébrique du cap au compas, de sa correction et de l'angle de dérive donne PU a tracé sur la carte.
Les vagues de vent provoquent un lacet du navire sur la route, en particulier lorsque le relèvement des vagues fait un angle aigu avec le DP du navire; "l'angle de saut ¡" peut atteindre £ 4°, et en raison de l'interaction complexe du vent avec la superstructure a de la vague avec la coque, le signe de ¡ peut devenir opposé au signe de l'angle a et grand en valeur , c'est à dire. le navire n'ira pas au vent, mais au vent: par exemple, a \u003d + 2 °. ¡ = -3° ; effet cumulatif (a + ¡) = -1° (avec un vent bâbord, le navire part à gauche !).
En conclusion, considérons une question qui n'est propre qu'à un voilier :
Si un voilier doit atteindre la cible « sous le vent », c'est-à-dire pour aller contre le vent, il faut alors appliquer des virements de bord, c'est-à-dire virer de bord face au vent (Fig. 1.19.).
Le point de virage (changement de virement) est au moment où l'objet est sur le DO égal à deux fois l'angle de virement optimal plus a (angle de virement optimal = angle de plus grande montée en se déplaçant face au vent).
Comptabilité des flux
L'eau des mers et des océans, pour diverses raisons, a un mouvement vers l'avant, appelé courant.
Le flux a deux éléments : la vitesse et la direction. La vitesse d'un courant est le nombre de kilomètres parcourus par les particules d'eau en une heure. Avec un courant faible, sa vitesse est déterminée par le nombre de kilomètres par jour.
La direction du courant est considérée comme la direction dans laquelle l'objet flottant s'éloigne de l'observateur uniquement sous l'influence du courant seul.
Habituellement, la direction du courant est indiquée en points vrais et reçoit son nom, comme la route du navire, selon le point de l'horizon vers lequel il se dirige. Il est de coutume de dire à propos de la direction du courant que le courant, comme le navire, vient de la boussole.
Les courants sont constants, périodiques (marée) et aléatoires.
Permanent - ce sont des courants dont la direction et la vitesse moyenne ne changent presque pas d'année en année. La vitesse du courant est différente et elle fluctue de 10 à 120 milles par jour.
Les courants de marée sont appelés courants qui résultent de l'action des marées.
La vitesse des courants de marée dans certaines zones atteint des vitesses importantes (£ 15 nœuds)
Les courants aléatoires se produisent à la suite de vents soufflant longtemps dans la même direction, ainsi que de pluies tombant longtemps, etc.
Tout ce qui a été dit précédemment dans cette section sur l'estime vous permet de prendre en compte le mouvement du navire uniquement par rapport à l'eau. Évidemment, pour assurer la sécurité de la navigation, il faut aussi tenir compte du courant.
Le vecteur vitesse courant V t est caractérisé par sa direction par rapport au méridien K t et la vitesse V t. Notons le vecteur de la vitesse relative du navire V s, et le vecteur de sa vitesse absolue (par rapport à la côte et fond de la mer) vitesse, que l'on appelle aussi la voie V p. D'après la signification de ces vitesses, on a l'égalité vectorielle suivante :
Si la vitesse relative V s et la trajectoire du navire IK = KK + DK, l'angle de dérive a et le vecteur courant V T sont donnés, alors pour savoir où et à quelle vitesse le navire va, il faut résoudre l'égalité vectorielle. Pour ce faire, d'abord, comme décrit dans le paragraphe précédent, PU a est trouvé et la ligne de voie est posée sans tenir compte du courant. Un vecteur V c est construit le long de cette ligne, et un vecteur V T est construit à partir de son extrémité (Fig. 1.20). Le vecteur de rapprochement V p donne l'angle de route PU, la vitesse sol, et révèle également l'angle de dérive b. Cet angle est considéré comme positif lors de la dérive vers la droite et négatif vers la gauche. A partir des définitions et de la Fig. 1.20 voir
![]() .
.
L'angle de route PU c détermine la direction de la ligne de route du navire, au-dessus de laquelle ils s'inscrivent, comme précédemment, KK, DK et l'angle de dérive total c \u003d a + b. Des points dénombrables sont appliqués sur la même ligne, mais la natation S l est reportée le long de la ligne PU a, d'où les empattements sont transférés sur la ligne de chemin PU parallèlement au vecteur V T (voir Fig. 1.20).
Si l'action du vecteur et du courant est estimée à partir d'observations, par exemple à partir d'observations précises, alors l'angle de dérive est obtenu Avec entre les lignes de la route vraie et la route du navire
![]() .
.
L'angle de dérive c est l'angle entre la proue du plan central du navire et son vecteur de vitesse au sol V p. La dérive vers la droite est considérée comme positive et vers la gauche - négative.
Le plus souvent en pratique, le principal problème de pose, compte tenu de la dérive et du courant, est généralement résolu dans un cadre différent. A savoir, la ligne donnée est le chemin le long duquel le navire doit aller malgré l'action du vent et du courant. L'angle de dérive a et le vecteur courant V T sont connus. La solution graphique d'un tel problème s'effectue comme suit.
Sur la carte, à partir du point de départ du calcul, une ligne d'un chemin donné est tracée, qui constitue l'angle du PU par rapport au méridien (Fig. 1.21). A partir du même point, le vecteur flux V T est construit en fonction de ses éléments K t et V T, et à partir de la fin de ce vecteur avec une solution compas égale à V c, une encoche est pratiquée sur la ligne de piste. Cela révèle la vitesse au sol V p, l'angle au sol PU a et l'angle de dérive b (voir Fig. 1.21).
Bien sûr, au lieu d'un triangle vectoriel de vitesses dont les côtés expriment le nombre de miles par heure, vous pouvez construire un triangle similaire de distances S = Vt pour le même intervalle de temps t.
Des points dénombrables, comme toujours, sont appliqués sur la ligne de piste, pour lesquels la nage S l est décalée le long de la ligne PU a et démolie parallèlement au vecteur V T sur la ligne de piste.
Le navire est affecté par le courant total (ou total), dont la direction et la vitesse sont souvent connues avec de grosses erreurs. Si nécessaire, la direction de КТ et la vitesse VТ peuvent être déterminées par la méthode de "navigation" à partir d'observations : avec un compte suffisamment précis du vent, КТ est égal à la valeur moyenne de plusieurs directions résiduelles, et VТ est la valeur moyenne de plusieurs valeurs résiduelles ramenées à une heure de navigation.
Pendant le voyage, le navigateur doit anticiper l'heure et (parfois) le décompte du décalage pour le déclenchement de divers événements : traversée, la distance la plus courte jusqu'au repère, l'ouverture du phare, le point de report, etc. Pour chaque événement, un point est marqué sur la carte, et le temps T et la lecture du décalage OL sont trouvés par les formules (Fig. 1.22.) :
; ![]()
![]() ; .
; .
Sur la fig. 1.22 S p et S l sont indiqués pour la traverse du phare, OIP ^ = IP ^ ±180 °, IP ^ = IR ± 90 °.
Comptabilité de la diffusion
La circulation s'appelle la trajectoire du centre de masse du navire avec une pose constante du gouvernail.
A prendre en compte lors de la pose, la circulation des navires de petit et moyen tonnage est prise comme un arc de cercle de rayon R c (moitié du diamètre tactique) et de temps t 180 d'un tour de 180°. Ces caractéristiques d'agilité sont déterminées à partir d'observations de terrain, généralement à deux safrans couchés : en demi-bord - 15° et à bord - 35° pour un navire chargé et vide.
Si les lignes de parcours sont définies sur la carte avant et après le virage, la circulation est construite comme suit (Fig. 1.23). On trace la bissectrice MO de l'angle d'intersection de ces droites et on y trouve un point O, à partir duquel un arc de rayon R c leur est tangent. Cela détermine le point de départ H et la fin K du virage.
Le temps pour tourner d'un angle a (en degrés) est estimé par la formule
![]() .
.
Dans les autres cas, si le point H du début du virage et la direction
lignes de la nouvelle assise, la circulation est prise en compte lors de la pose d'une manière différente (voir Fig. 1.23.).
À partir du point H, la perpendiculaire MAIS à la ligne du parcours précédent est restaurée, le rayon R c est posé le long de celle-ci et un arc avec ce rayon est tracé à partir du centre résultant O. Ensuite, à l'aide d'un rapporteur et d'une règle parallèle, une ligne d'un nouveau parcours est tracée tangente à cet arc, ce qui détermine le point final K.
Les mêmes points H et K pour un R c et un angle de rotation a donnés peuvent être obtenus par des calculs et la construction des segments d 1 et d 2 ou de l'angle q et du segment d.
Angle de cap navigation intermédiaire ![]() , la valeur du voyage intermédiaire
, la valeur du voyage intermédiaire ![]() .
.
L'arrivée du navire au point de départ H doit être calculée en fonction de l'heure et du décompte du décalage. Il est encore plus important de tracer le relèvement sécant et la distance des amers d'arrivée en ce point. Il est également nécessaire de contrôler la sortie vers la ligne du nouveau parcours selon des relèvements et des distances d'amers prédéterminés.
S T \u003d V T. t un;
La direction du segment S T est posée à partir du point H dans la direction opposée à l'écoulement, le reste ressort clairement de la figure.
Pour assurer la sécurité de la navigation, le conducteur doit connaître à tout moment la position de son navire, ce qui peut être obtenu en maintenant pavé de navigation. Le traçage comprend l'estime, les calculs et le traçage sur une carte pour localiser un navire, et les calculs de manœuvre pour éviter d'autres navires.
Le pavé de navigation est divisé en deux types :
- pose préliminaire effectué avant de prendre un volétudier la transition à venir à travers des tableaux, des manuels et des guides de natation : cela donne une idée générale des conditions de la transition.
- joint exécutif effectué dès le moment du départ et jusqu'au bout. Dans ce cas, le choix des parcours et tous les facteurs pris en compte sont déterminés par la situation de navigation spécifique.
compte s'appelle l'enregistrement du mouvement du navire sur la carte marine. Selon les conditions de navigation, cette comptabilisation s'effectue de deux manières :
- décompte écrit utilisé pour les voyages en mer, lorsqu'il faut être guidé par des cartes à petite échelle . Son essence réside dans le calcul des coordonnées du navire, qui est effectué par le navigateur selon des formules, suivi du dessin du lieu calculé sur la carte.
- calcul graphique il est utilisé lors de navigations près des côtes, lorsque des profondeurs dangereuses, des obstacles de surface et sous-marins, l'influence du vent qui crée la dérive et les courants peuvent être localisés à des distances relativement courtes du parcours. Dans ce cas, le calcul doit être effectué avec une attention particulière et continue.
Le point de départ pour tracer la trajectoire du navire sur la carte est déterminé par le capitaine. Les coordonnées du point de départ de la pose sont consignées dans le journal de bord du navire. Au moment où vous commencez à poser, vous devez allumer le journal et déterminer la correction de la boussole.
A partir du point de départ sur la carte, une ligne du premier parcours est tracée. Si la navigation s'effectue à proximité des côtes, les points de comptage doivent être marqués toutes les heures, lors de la navigation en pleine mer en fin de quart, en début et fin de virages, lors des changements de vitesse, lors de la réception des observations. A côté de la place dénombrable sous forme de fraction, le moment est enregistré selon l'horloge du navire avec une précision de 1 minute et la lecture du décalage avec une précision de 0,1 mille. Pour contrôler et clarifier l'estime, la place du navire dans le voyage est déterminée par diverses méthodes de navigation, de radionavigation et d'astronomie. Reçu en même temps points observés mettre sur la carte. À la réception du lieu observé, une nouvelle pose est effectuée à partir du point observé, indiquant sur la carte l'ampleur et la direction de l'écart du navire par rapport à l'estime. La ligne courbe reliant les points observés et dénombrables est appelée Non visqueux.
Calcul graphique sans dérive ni courant :
Lorsque vous naviguez sans dérive ni courant, la trajectoire du navire sur la carte coïncide avec la ligne IC, par conséquent, le mouvement du navire sur la carte est pris en compte le long des lignes IC, le long desquelles les distances parcourues par le navire le long du journal sont tracées, compte tenu de son coefficient CL. A partir du point de départ sur la carte, une ligne du premier parcours est tracée. Le CI retiré de la carte est transféré au KK (GKK), sur lequel ils tombent selon le compas magnétique (gyro). Sur la carte au-dessus de la ligne IR, le cap de la boussole et sa correction sont inscrits. Distance parcourue par parcours S déterminé par log :
S = Cl (OL 2 - OL 1);
(Où OL 2- compte à rebours du décalage à l'emplacement du navire, OL 1- compte à rebours du décalage au point de départ, CL- facteur de décalage).
Sur les lignes IC dans les cas indiqués ci-dessous, on applique la place calculée du navire, c'est-à-dire la place calculée en fonction du cap et de la navigation. De plus, une place comptable est appliquée aux points de début et de fin des virages, lors du changement de vitesse, lors de la réception des observations. Près de la position du navire, sous forme de fraction, le moment est enregistré selon l'horloge du navire avec une précision de 1 min (T) et la lecture du décalage avec une précision de 0,1 mille (OL).
Deux types de tâches peuvent être effectuées pendant le traçage :
tâche directe. connu CQ, v l (v environ), le point de départ du calcul (φ 1, λ 1, T 1, OL 1). IC inconnu, point final du calcul (φ 2 , λ 2 , T 2 , OL 2).
Solution:
ou S = ROL k l
Retirez les coordonnées dénombrables φ 2 , λ 2 et déterminez le temps d'arrivée à ce point T 2 = T 1 + S/v, notez les lectures du retard OL 2 .
Problème inverse. IR, v l (v environ), φ 1 , λ 1 , T 1 , ol 1 sont connus.
QC inconnu, φ 2 , λ 2 , T 2 , OL 2 .
Solution:
- Poser la ligne IC à partir du point de départ du calcul ;
- Calculer KK = IR - ΔK et demandez-le au timonier;
- Calculer S l \u003d v l t(si le point de calcul est calculé à l'avance), ou S = ROL k l(si le point dénombrable est calculé pour le moment passé) et mettez-le sur la ligne IC ;
- Enlever φ 2 , λ 2 et déterminer l'instant d'arrivée en ce point T 2 = T 1 + S/v, et à cet instant lire le retard OL 2 .
§ 26. Calcul graphique et écrit de la route du navire
Informations générales. La pose, effectuée sans vérifier la position du navire en déterminant sa place sur des objets côtiers ou sur des corps célestes, est appelée l'estime du navire. Le calcul effectué sur la carte par la méthode des constructions graphiques est appelé graphiqueà l'estime de la trajectoire du navire et effectuée à l'aide de calculs utilisant des formules spéciales - écrit(analytique).Calcul graphique. L'essence de cette méthode est la suivante. Au moment de déterminer le point de départ a "(voir Fig. 29), ils notent l'heure mais l'horloge du navire (jusqu'à 1 minute) et les relevés du compteur de décalage (jusqu'à 0,1 mille). Le point de départ a" est encerclé et une inscription est faite près de lui dans un endroit libre sous forme de fraction: numérateur - temps, dénominateur - lectures de décalage 18,00 / 2,5 Si le point observé a "est suffisamment proche du point de départ a, alors à partir du point a" une première ligne de parcours est tracée sous la forme d'une droite parallèle à la ligne ac. Après cela, la ligne ac est effacée de la carte, et sur la ligne nouvellement tracée est inscrit le nombre de degrés du cap de la boussole et ensuite, entre parenthèses, la correction générale du compas AK calculée pour ce cap, de sorte qu'elle puisse toujours être établi quel cours a été jugé.
Si le point observé a" est si éloigné du point a que la trajectoire du navire passe à proximité des dangers (ligne pointillée sur la Fig. 29), alors une nouvelle route est tracée comme indiqué ci-dessus au § 25.
Sur la ligne de chemin, les places numérotées du navire sont marquées toutes les heures. Pour ce faire, la distance parcourue par le navire en 1 heure, à l'échelle de la carte, est tracée au mètre sur la trajectoire du navire depuis le point de départ. À l'endroit marqué par le compteur, une encoche est faite sous la forme d'une courte ligne droite perpendiculaire à la ligne de voie, ainsi qu'une inscription des relevés de temps et de décalage.
Si le navire doit changer de direction, alors au moment du changement de cap, l'heure et le compte à rebours du décalage sont à nouveau remarqués. Après avoir calculé le voyage effectué à partir du dernier point dénombrable, déposez-le le long du chemin, marquez le point de virage avec un enregistrement sous forme de fraction (04,37 / 70,2) et tracez un nouveau cap à partir de ce point. Si, pour une raison quelconque, le navire se retrouve au point c", qui est sensiblement éloigné du point c marqué par la pose préliminaire, alors un nouveau cap est tracé de manière à atteindre le point d du deuxième virage. Après cela, la ligne cd est également effacé de la carte, et sur la ligne c "d" inscrire le nombre de degrés KK et ensuite, entre parenthèses, la correction générale de la boussole AK pour CE parcours.
Le maintien d'un tracé graphique permet au navigateur d'avoir une représentation visuelle de la position du navire par rapport aux aléas de navigation.
La précision du traçage dépend de la précision avec laquelle le parcours est tracé et la distance parcourue est prise en compte. La précision du joint est exprimée par la formule suivante :
où Slo - la valeur de la navigation effectuée par le navire ;
Ek est l'erreur dans la correction totale de la boussole ;
Es - erreur de correction du décalage, %.
Exemple 26. Déterminez le rayon du cercle à l'intérieur duquel devrait se trouver la position du navire qui a dépassé un cap de 60 milles, si l'erreur possible de cap est de ±1°, et l'erreur possible de correction du décalage est de (-2,0 %) .
Solution. Par la formule (31)
Faire tourner le navire d'un cap à un autre introduit une erreur supplémentaire dans la pose, car après avoir changé le gouvernail, le navire ne change pas instantanément la direction du mouvement, mais décrit une certaine courbe (circulation) par le centre de gravité.
La prise en compte de la circulation est d'une grande importance lors de la navigation dans des eaux exiguës, des espaces étroits, des écueils, etc. La circulation est prise en compte comme suit.
Le navire (Fig. 30), suivant dans la direction de K1, au point A doit tourner dans la direction de K2 (l'angle de rotation est a). Pour tenir compte de la circulation, on trace une bissectrice de l'angle interne de rotation (3 = 180°-a et on y cherche le centre O du cercle de rayon égal à la moitié du diamètre tactique de la circulation Dc qui est déterminé empiriquement et généralement exprimé en longueurs de coque du navire.
Après avoir tracé un cercle, marquez les points B et C de sa touche avec les lignes K1 et K2. Le point B est considéré comme le début du tour.
Décompte écrit. La position de calcul du navire peut être obtenue par la méthode analytique du calcul écrit dans les cas où il est irrationnel d'utiliser le calcul graphique de la trajectoire du navire : lors de la navigation dans les hautes latitudes, lors de la navigation dans les glaces, de la chasse à la baleine, etc.

Riz. trente.
L'essence du calcul écrit est de déterminer les coordonnées du point d'arrivée avec les coordonnées connues du point de départ, le cap et la navigation du navire. A l'aide d'un calcul écrit, il est possible de résoudre le problème inverse : déterminer la navigation et le cap du navire à partir des coordonnées connues des points d'arrivée et de départ.
Sur la base des formules (4) et (5), les coordonnées du point d'arrivée peuvent être exprimées comme suit :

Si la navigation a lieu à de basses latitudes, les expressions pour RH et RH peuvent être facilement obtenues à partir de l'examen de ce que l'on appelle triangle de navigation ABC (Fig. 31), dans laquelle :
A - point de départ avec les coordonnées cp1 et L2 ;
B - point d'arrivée avec les coordonnées cp2 et L2 ;
K \u003d LSAB - cap du navire lors du déplacement d'un point A à un point B ;
AB=S - distance entre les points de départ et d'arrivée ;
AC=RSh et VS=OTSH.
Si nous supposons que le triangle ABC est plat et rectangulaire, alors directement à partir de la Fig. 31 on obtient :

De plus, en substituant la valeur de OT W de la formule (6), nous obtenons
En fait, AABC n'est ni plat ni rectangulaire (la figure ACBC "est un trapèze sphérique). Par conséquent, RD1 \u003d \u003d RD2 (cpB \u003d cpA), mais la valeur réelle
Où
![]()
- latitude moyenne.
Pour faciliter le travail du navigateur dans le MT-63, il existe des tables auxiliaires : onglet. 24 donne les valeurs RSH et RSH pour les arguments S (natation) et K (cap) ; languette.
25-a - Valeurs RD en termes de φm et RNR.

Riz. 31.
Si le calcul est effectué sur la transition effectuée par le navire sur le même parcours, alors il est dit simple, et s'il y a plusieurs parcours, il est dit composite. Le calcul composite est utilisé lors de la navigation sur le courant, en particulier sur la marée; dans ce cas, le cours est pris en compte comme un cours supplémentaire distinct (cours). Dans le calcul composite, RSH et RD sont calculés ou sélectionnés à partir de tableaux pour chaque parcours individuel et chaque natation. En composant la somme algébrique de tous les RSH et OSH, nous obtenons le RSH général et l'OSH général. Ensuite, calculez la latitude du point d'arrivée à l'aide de la formule
φ2 = φ1 + PSH général
Et la formule générale
La détermination de la position du navire en calculant ses coordonnées actuelles (dénombrables) à partir des coordonnées initiales connues le long du parcours, de la vitesse, en tenant compte de la dérive, de la dérive et du temps s'appelle le calcul des coordonnées du navire ( Dead Reckoning ) ou abrégécompte .
Les coordonnées de la place calculée du navire sont appelées coordonnées dénombrables et sont marqués :
φ AVEC - la latitude de calcul ;
λ AVEC - longitude dénombrable.
Lieu dénombrable - la position du navire, déterminée sur la base du calcul des coordonnées de sa position.
Attribution de compte est l'orientation du navire par rapport au terrain avec une précision qui assure la sécurité de navigation de sa navigation.
La ligne le long de laquelle le navire se déplace réellement sous l'influence de la propulsion, du vent et du courant est appelée ligne de piste.
L'essence de la numérotation consiste en ce qu'à partir d'un point de départ connu sur la carte de navigation, les directions du mouvement du navire et les distances parcourues le long de celles-ci sont tracées afin d'obtenir sa position à un instant donné.
compte coordonnées du navire classifié:
Par méthode de comptage :
graphique , sur la base de la comptabilisation continue des éléments du numéral et de leur représentation sur la carte de navigation ;
analytique , basée sur le calcul des coordonnées courantes selon certaines dépendances mathématiques.
Par degré d'automatisation :
automatique produit à l'aide d'ordinateurs spéciaux (autotraceur, autonumérateur, etc.);
d'observation , calcul automatique basé sur la mise à jour continue des coordonnées calculables actuelles par des points de repère externes ;
manuel , réalisé à l'aide d'actions grapho-analytiques effectuées manuellement ou à l'aide de tableaux.
Exigences à l'estime
Au compte ce qui suit exigences:
le calcul doit être en continu, afin de connaître à tout moment la position du navire (ses coordonnées actuelles) par rapport au terrain ;
le calcul devrait être précis assurer la sécurité de la navigation et la solution des problèmes inhérents à ce navire ;
le calcul devrait suffire simple et visuel.
La meilleure façon de comptabiliser le mouvement des navires est automatique avec calcul graphique manuel obligatoire, qui, en substance, satisfait à toutes les exigences du calcul.
Même en présence de systèmes de navigation modernes, dans lesquels le processus de calcul est entièrement automatisé et d'une grande précision, le calcul graphique manuel est obligatoire pour contrôler et éliminer les échecs en cas de dysfonctionnement des instruments.
La méthode graphique manuelle de calcul est souvent appelée pavé de navigation, bien que ce dernier → le concept soit plus large (+ déterminer les lieux, etc.).
Navigation pose de la trajectoire du navire – constructions graphiques sur la carte marine lors de la résolution de problèmes de navigation de navigation.
Tâches à résoudre avec l'estime graphique manuelle
En l'absence de vent et de courant, le navire ne se déplace par rapport au fond marin que sous l'influence de sa propre propulsion.
Si l'on néglige le lacet du navire (écarts du barreur par rapport au cap fixé pour celui-ci) et que l'on considère que la correction de l'indicateur de cap est constante, alors la ligne de route du navire sur la carte de navigation s'affichera en ligne droite coïncidant avec la direction de la route vraie.
Chemin du navire - le sens de déplacement du centre de masse du navire, mesuré par l'angle horizontal entre la partie nord du vrai méridien et la ligne de route du navire dans le sens des aiguilles d'une montre de 0° à 360° (système de comptage circulaire).
Piste du navire - la ligne le long de laquelle le centre de masse du navire se déplace par rapport au fond marin(fig.5.3).
Riz. 5.3. Ligne de voie et voie de bateau
Avec le calcul graphique manuel des coordonnées du navire, sans tenir compte de la dérive et du courant, les tâches suivantes sont résolues :
calcul et pose de routes vraies ;
calcul et pose des distances parcourues par le navire ;
comptabilisation de la circulation - changements de cap du navire.
Lors du calcul, les lectures des instruments sont utilisées:
répétiteur indicateur de cap(compas magnétique, compas gyroscopique, etc.) – CQ;
répétiteur décalage(valeurs V L Et LO);
tachymètres(N rpm - le nombre de tours des hélices);
horloge du navire (heure actuelle).
La position du navire au mouillage (tonneau, à quai), déterminée par des observations d'amers côtiers ou à l'estime (Fig. 5.4), est prise comme point de départ pour le début de l'estime.

Riz. 5.4. Enregistrement du calcul graphique de la route du navire sur la feuille de route
1. Par coordonnées dénombrables ( φ AVEC , λ AVEC) nous plaçons le lieu d'ancrage, près duquel, dans le lieu libre, nous enregistrons le temps de prise de vue depuis l'ancre et la lecture complète du compteur de décalage ( LO 0 ):
Dans tous les cas, la barre fractionnaire de l'entrée est effectuée le long d'une règle et parallèle à une parallèle.
2. A partir du point d'ancrage, on trace la direction de la vraie ligne de route, calculée par la formule :
Si le cap provient d'un gyrocompas, alors
Si le cap provient d'un compas magnétique, alors
|
RI = QC MK + Δ MK |
|
Δ MK = d + δ |
– correction du compas magnétique.
Au-dessus du point d'ancrage ligne de route vraie (ligne de voie) l'inscription est faite :
CQ est l'abréviation du cap compas ( GKK, KK GL , KK P);
127,0° - la valeur du cap au compas donné au barreur (signe égal entre CQ et 127,0 ° n'est pas réglé selon les règles);
(+2,0°) – la valeur et le signe de la correction de l'indicateur de cap adopté sont indiqués entre parenthèses.
L'inscription au-dessus de la ligne de parcours permet de contrôler :
L'exactitude du maintien du cap défini (127,0°) par le barreur ;
La valeur de la correction acceptée et prise en compte de l'indicateur de cap (+2,0 °);
L'exactitude de la direction de la ligne du parcours vrai sur la carte (129,0 °).
Lorsque le navire suit une route donnée, le barreur vérifie régulièrement (toutes les 15 minutes) les lectures des routes par rapport à l'indicateur de route principale (selon CG ou par Géorgie ou autres) et à l'aide d'un compas magnétique avec rapport au capitaine de quart (l'officier de quart).
Les coordonnées comptables du navire sont enregistrées dans le journal de bord :
lors du tir d'un navire depuis l'ancre (canon) et lors de l'ancrage (canon);
en navigation à l'estime, aux heures multiples de la 4ème (00, 04, 08 ... 20) ;
toutes les heures où le navire navigue à l'estime près du rivage ;
lors du changement de quart de navigation (navigation) et dans d'autres cas, selon les instructions du capitaine.
La position numérable du navire est appliquée sur la carte de navigation :
en heures divisibles par quatre (00, 04 ... 20);
lorsque le navire change de cap ou de vitesse ;
lors du changement de la montre de navigation (en marche);
toutes les heures lorsque le navire navigue près du rivage ou dans des eaux restreintes, et dans les autres cas, selon les directives du capitaine.
Pour trouver un lieu calculable pour un temps (actuel) donné, suivez (Fig. 5.4):
Enregistrer les lectures de l'horloge du navire à ± 1 minute près (11.00) ;
Correction du nombre de décalages ( LO 1 ) précis à 0,1 mile (60,4) ;
(Pour V L= 18 nœuds → POUR L = 1,02)S L= 1,02 11,8 = 12,0 milles.
S À PROPOS =12,0 milles
à condition que S L =S À PROPOS → mettre de côté sa valeur (à l'échelle de la carte) à partir du point de départ le long de la route vraie et tracer la position calculée du navire (à 11h00) avec un symbole ( ligne de course IR ~ 5 mm).
À côté de l'endroit à compter, écrivez sous forme de fraction ![]()
Lors de la conduite du calcul, il devient souvent nécessaire connaître l'heure et le compte à rebours du décalage d'arrivée du navire à un point donné(point de rencontre, point d'ancrage, etc.).
Un tel point peut être réglé (fig.5.5):

Riz. 5.5. Façons de définir un point sur la carte
coordonnées ( φ, λ );
direction vers le point de repère ( IP ou KU);
distance ( D) au point de repère, etc.
La procédure pour résoudre le problème .