
Квадрик может висеть в одном месте и вести фото и видеосъемку, именно по этому, многие фотографы идут в ногу с прогрессом и покупают квадрокоптеры для видео съемки.
Квадрокоптеры ворвались в нашу жизнь вместе с техническим прогрессом. Сегодня заказать электронику для квадрокоптера из китая стоит очень дешево. Собрать раму квадрокоптера своими руками из подручных материалов и вовсе не сложно. Научиться управлять можно с помощью авиасимуляторов. Так что главное – это наличие желания сделать квадрокоптер своими руками.
Электронику для квадрокоптера лучше всего купить готовую.
Детали самодельного квадрокоптера
Двигатели для квадрокоптера, 4 шт — D2822/14 1450kv

Конечно, дополнительная покупка мелкого квадрокоптера немного накладна, но, летая на таком вы научитесь управлять и сможете летать на большом квадрокоптере с камерой без падений! А мелкую игрушку всегда можно будет подарить ребенку.
Ну и на последок, небольшое видео полета на квадрокоптере, запись с камеры.
В этой статье мы рассмтрели основные прнципы изготовления самодельных квадрокоптеров. Если вы хотите узнать больше — смотрите раздел
iskra комментирует:
как сделать квадракоптер чтобы он летал в радиусе 500 метров с камерой реального времени которая выводит изображение на экран
chelovek комментирует:
Ребят помогите!хочу собрать квардрик на платформе ардуино мега с использованием вот этох компонентов:
Чтобы собрать квадрокоптер своими руками в домашних условиях, следует сначала разобраться в базовых компонентах квадрокоптера.
Детали для сборки квадрокоптера
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm (последние три цифры в названии Q450 указывают на расстояние между моторами в мм по диагонали). Представляет собой корпус летательного аппарата, который будет использован для монтажа всего прочего оборудования и электронной начинки. Состоит их 4 лучей и печатной платы. Вес 295 грамм.
Banggood.com
Цена 922 руб.
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки.
Продается в интернет-магазине Banggood.com
Цена 571 руб/шт

- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware для регулирования оборотов и контроля скорости. 4 штуки.
Продается в интернет-магазине Banggood.com
Цена 438 руб/шт

- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane, 4 штуки. Два пропеллера правостороннего вращения и два левостороннего.
Продается в интернет-магазине Banggood.com
Цена 125 руб/шт

- Модуль управления квадрокоптером KK2.1.5 kk21evo. 1 шт.
Продается в интернет-магазине Banggood.com
Цена 1680 руб

- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S ~90C Lipo Pack, необходимо готовить минимум две штуки, а лучше четыре, поскольку они быстро садятся. 1 шт.
Продается в интернет-магазине Parkflyer.ru
Цена 1268 руб/шт

- Устройство для зарядки аккумуляторов Hobby King Variable6S 50W 5A. 1 шт.
Продается в интернет-магазине Hobbyco.ru
Цена 900 руб

- Коннектор для подключения аккумулятора XT60 Male Plug 12AWG 10cm With Wire. 1 шт.
Продается в интернет-магазине Banggood.com
Цена 144 руб

- Хомуты для закрепления проводов на корпусе квадрокоптера. 1000pcs 2.0x100mm Black/ White Nylon Cable Ties Zip Ties. 1 упаковка.
Продается в интернет-магазине Banggood.com
Цена 316 руб

- Коннекторы 20 Pairs 3.5mm Bullet Connector Banana Plug For RC Battery / Motor. Для проводов регулятора. 1 упаковка.
Продается в интернет-магазине Banggood.com
Цена 256 руб

- Лента с липучкой для прикрепления аккумулятора к корпусу квадрокоптера. 1 шт.
Продается в интернет-магазине Banggood.com
Цена 79 руб

- Винты 50pcs Motor Fixing Screws Set for DJI F450 F550 HJ450 550 Quadcopter Multicopter. 1 упаковка.
Цена 217 руб

- Пульт управления квадрокоптером Spektrum DX6 V2 with AR610 Receiver. В одном комплекте поставляются приёмник и передатчик. 1 шт.
Цена 9700 руб

Итого комплект оборудования для сборки обойдется в 20018 руб.
Особенности при выборе компонентов

Базовые характеристики передатчика:
- Режимы Mode1 или Mode2. В первом режиме ручка газа находится справа, во втором режиме ручка газа находится слева.
- Частота передатчика составляет 2,4Ггц.
- Число каналов. Минимум каналов, которые требуются для осуществления управления летательным аппаратом — четыре. Управляющее оборудование от Spektrum DX6 V2 with AR610 Receiver содержит 6 каналов.
Пошаговая инструкция по сборке квадрокоптера своими руками
- Уменьшаем длину проводов на регуляторах. При подсоединении регулятора к моторам длина проводов будет значительно превышать длину луча на котором вся эта конструкция будет крепиться.

- Припаиваем коннекторы к концам проводов на регуляторе чтобы в дальнейшем можно было подключить регулятор к моторам.

- Производим монтаж двигателей — привинчиваем по 1 двигателю на каждый луч.


- Осуществляем сборку рамы. Привинчиваем лучи к плате.


- Подключаем провода регуляторов к двигателям. Кабели регулятора и двигателя соединяются в произвольном порядке. В дальнейшем может понадобиться изменение порядка подключения при окончательной конфигурации беспилотника.При использовании выделенных регуляторов для каждого двигателя, положительный и отрицательный полюс должны соединяться с контроллером, идя лишь от одного регулятора.

- Закрепляем на корпусе модуль управления двухсторонним скотчем. Его лучше всего расположить в центральной части платформы.

- Закрепляем на корпусе приемник двухсторонним скотчем и подключаем его к модулю управления. Приёмник должен быть расположен максимально близко к модулю.

Назначение каналов описано в руководстве к приёмнику. Обычно их последовательность такова:
- Элероны — канал, отвечающий за левые и правые повороты;
- Элеватор — канал, руководящий направлениями вперёд и назад;
- Газ – канал, управляющий газом. Руководит выполнением взлёта и посадки, а также переменами высоты;
- Рысканье — канал даёт возможность производить вращение квадрокоптера вокруг его оси.

- Запитываем устройство. Подключаем к коннектору аккумуляторную батарею.





Эта операция завершает процесс сборки квадрокоптера.

Наладка
- Производим запуск двигателей. Активация двигателей нуждается в выполнении процесса запуска моторов — арминга. Руководство к эксплуатации подробно рассказывает каким образом этого добиться.Деактивация двигателей требует проведения процедуры дизарминга.
- Включаем слабый газ и убеждаемся, что моторы вращаются. Характер вращения должен быть таким же, как указано на схеме в руководстве к контроллеру. При неправильном вращении двигателя нужно просто поменять местами полюса проводов, идущих от двигателя к контроллеру.

- Привинчиваем вторую платформу к корпусу квадрокоптера.

- Подсоединяем к корпусу ленту с липучкой для крепления аккумулятора.

Сборка квадрокоптера на ардуино своими руками
Заключение
Выполнять самостоятельную сборку квадрокоптера могут лишь те, кому по душе решение сложных проблем. Это должны быть люди, испытывающие наслаждение от хода разнообразных расчётов и процесса сборки устройства.
Достоинство коптера, собранного собственными руками в том, что в любой момент можно произвести его апгрейд, добавляя новое оборудование.
Несмотря на то что квадрокоптеры крайне модная тема, выбирать компоненты для сборки своего аппарата по-прежнему не так просто. Выбор деталей для конкретного проекта — это мучительный поиск оптимального сочетания веса, мощности и функ-циональности. Поэтому прежде, чем окунуться в мир бесчисленных интернет-магазинов и безымянных китайских производителей, давай проделаем подготовительную работу.
Что такое квадрокоптер и для чего это надо
Мультироторы, они же мультикоптеры или просто коптеры, — это беспилотные летательные аппараты, предназначенные для развлечения, съемки фото и видео с воздуха или отработки автоматизированных систем.
Коптеры обычно различают по числу используемых моторов — начиная от бикоптера с двумя моторами (как GunShip из фильма «Аватар») и заканчивая октакоптером с восемью. На самом деле число моторов ограничено только твоей фантазией, бюджетом и возможностями полетного контроллера. Классическим вариантом является квадрокоптер с четырьмя моторами, расположенными на перекрещивающихся лучах. Такую конфигурацию еще в 1920 году попытался соорудить француз Этьен Омишен (Étienne Oehmichen), и в 1922 году у него это даже получилось. По сути, это самый простой и дешевый вариант сделать летательный аппарат, способный без особых проблем поднимать в воздух небольшие камеры вроде GoPro. Но если ты собираешься взлетать с серьезной фото- и видеотехникой, то стоит выбирать коптер с большим числом моторов — это не только увеличит грузоподъемность, но и добавит надежности, если в полете выйдет из строя один или несколько моторов.
Теория полета
В теории полета (аэродинамике) принято выделять три угла (или три оси вращения), которые задают ориентацию и направление вектора движения летательного аппарата. Проще говоря, летательный аппарат куда-то «смотрит» и куда-то двигается. Причем двигаться он может не туда, куда «смотрит». Даже самолеты в полете имеют какую-то составляющую «сноса», которая уводит их от курсового направления. А вертолеты вообще могут летать боком.
Три эти угла принято называть крен, тангаж и рыскание. Крен — это поворот аппарата вокруг его продольной оси (оси, которая проходит от носа до хвоста). Тангаж — это поворот вокруг его поперечной оси (клюет носом, задирает хвост). Рыскание — поворот вокруг вертикальной оси, больше всего похожий на поворот в «наземном» понимании.
Основные маневры (слева направо): движение по прямой, крен/тангаж и рыскание
В классической схеме вертолета основной винт при помощи автомата перекоса лопастей управляет креном и тангажем. Так как основной винт обладает ненулевым сопротивлением воздуха, у вертолета возникает вращающий момент, направленный в сторону, противоположную вращению винта, и, чтобы его скомпенсировать, у вертолета есть хвостовой винт. Изменяя производительность хвостового винта (оборотами или шагом), классический вертолет управляет своим рысканием. В нашем же случае все сложнее. У нас есть четыре винта, два из них вращаются по часовой стрелке, два — против часовой. В большинстве конфигураций используются винты с неизменяемым шагом и управлять можно только их оборотами. Если они все будут вращаться с одинаковой скоростью, то они скомпенсируют друг друга: рыскание, крен и тангаж будут нулевыми.

Если мы увеличим обороты одного винта, вращающегося по часовой стрелке, и уменьшим обороты другого винта, вращающегося по часовой стрелке, то мы сохраним общий момент вращения и рыскание по-прежнему будет нулевым, но крен или тангаж (в зависимости от того, где мы сделаем ему «нос») изменятся. А если мы увеличим обороты на обоих винтах, вращающихся по часовой стрелке, а на винтах, вращающихся против часовой стрелки, уменьшим (чтобы сохранить общую подъемную силу), то возникнет вращающий момент, который изменит угол рыскания. Понятное дело, что все это будем делать не мы сами, а бортовой компьютер, который будет принимать сигнал с ручек управления, добавлять поправки с акселерометра и гироскопа и крутить винтами, как ему надо. Для того чтобы спроектировать коптер, необходимо найти баланс между весом, временем полета, мощностью двигателей и другими характеристиками. Все это зависит от конкретных задач. Все хотят, чтобы коптер летал выше, быстрее и дольше, но в среднем время полета составляет от 10 до 20 минут в зависимости от емкости аккумулятора и общего полетного веса. Стоит запомнить, что все характеристики связаны между собой и, к примеру, увеличение емкости аккумулятора приведет к увеличению веса и, как следствие, к уменьшению времени полета. Чтобы узнать, сколько примерно твоя конструкция будет висеть в воздухе и сможет ли вообще оторваться от земли, существует хороший онлайн-калькулятор ecalc.ch . Но прежде чем вбивать в него данные, нужно сформулировать требования к будущему аппарату. Будешь ли ты устанавливать на аппарат камеру или другую технику? Насколько быстрым должен быть аппарат? Как далеко тебе нужно летать? Давай посмотрим на характеристики различных компонентов.
 PX4 — бортовой компьютер с полноценной UNIX-системой
PX4 — бортовой компьютер с полноценной UNIX-системой
Рама
Основной момент, который нужно решить при выборе рамы, — будешь ли ты использовать готовую раму или же делать ее сам. С готовой рамой все проще, да и заказывать в любом случае придется множество деталей. При этом, учитывая цены в китайских магазинах, самодельный вариант может оказаться дороже. С другой стороны, собственную раму в случае аварии будет проще починить. Ну и, естественно, своими руками можно сделать любую, даже самую сумасшедшую конструкцию. Рассмотрим поподробнее самосборный вариант.
Сделать раму можно из любых подручных материалов (дерево, алюминий, пластик и так далее). Можно подойти чуть серьезнее и выпилить ее на ЧПУ-станке из плетеного карбона, причем можно усложнить задачу и сделать складную конструкцию.
Самый простой вариант для любителей DIY — пойти в OBI, «Леруа Мерлен» или на строительный рынок и купить квадратную алюминиевую трубу 12 × 12, а также алюминиевый лист толщиной в 1,5 мм. Для того чтобы сделать раму из таких материалов типа «четыре палки и крепеж», достаточно дрели или ножовки по металлу. Но нужно быть готовым к тому, что такая конструкция прослужит недолго. Все-таки все эти профили делают из очень мягкого материала (АД31/АД33), при полетах он будет легко гнуться.
 Oehmichen № 2, пилотируемый квадрокоптер французского инженере Этьена Омишена, запущенный в 1922 году
Oehmichen № 2, пилотируемый квадрокоптер французского инженере Этьена Омишена, запущенный в 1922 году
В качестве образца для твоей рамы можно взять упрощенную заводскую раму или же найти в интернете готовый чертеж. Более сложные материалы (например, углепластик) можно заменить на алюминий — если и получится тяжелее, то ненамного. В любом случае стоит обращать внимание на длину и симметричность лучей. Длина лучей выбирается исходя из диаметра используемых пропеллеров, так, чтобы после их установки расстояние между окружностями вращающихся винтов было не менее 1–2 см, и уж тем более эти окружности не должны пересекаться. Моторы, устанавливаемые на лучах, должны быть равноудалены от центра рамы, где будет располагаться «мозг», и (в большинстве случаев) находиться на одном расстоянии друг от друга, образуя равносторонний многоугольник.
При проектировании стоит учесть, что центр рамы должен совпадать с центром тяжести, поэтому установить аккумулятор сзади между лучами — плохая идея, если он не будет скомпенсирован грузом спереди, например камерой. Продумай, на что будет приземляться твой аппарат, для новичков можно посоветовать приспособить что-то мягкое на «пузе» или концах лучей, например плотный поролон или теннисные мячики. А также защити аккумулятор на случай неудачного приземления, например установи его между пластинами рамы или расположи под высокими посадочными лыжами.
info
Полет от первого лица (FPV) очень захватывает, особенно если пользоваться видео-очками и HeadTracker’ом, который будет повторять движения головы на подвесе FPV-камеры, создавая ощущение, что находишься в кабине пилота.
Моторы и пропеллеры
Из-за вращения моторов в разные стороны приходится использовать разнонаправленные пропеллеры: прямого вращения (против часовой) и обратного вращения (по часовой). Обычно используются двухлопастные пропеллеры, их легче балансировать и найти магазинах, в то время как трехлопастные дадут больше тяги при меньшем диаметре винта, но доставят много головной боли при балансировке. Плохой (дешевый и неотбалансированный) пропеллер может развалиться в полете или вызвать сильные вибрации, которые передадутся на датчики полетного контроллера. Это приведет к серьезным проблемам со стабилизацией и вызовет сильное смазывание и «желе» на видео, если ты снимаешь что-то с коптера или летаешь с видом от первого лица.
Регулятор скорости,он же ESC
У любого пропеллера есть два основных параметра: диаметр и шаг. Их обозначают по-разному: 10 × 4.5, 10 × 45 или просто 1045. Это означает, что диаметр пропеллера 10 дюймов, а его шаг 4,5 дюйма. Чем длиннее пропеллер и больше шаг, тем большую тягу он сможет создавать, но при этом повысится нагрузка на мотор и увеличится потребление тока, в результате он может сильно перегреться и электроника выйдет из строя. Поэтому винты подбираются под мотор. Ну или мотор под винты, тут как посмотреть. Обычно на сайтах продавцов моторов можно встретить информацию о рекомендуемых пропеллерах и аккумуляторах для выбранного мотора, а также тесты создаваемой тяги и эффективности. Существуют и пропеллеры с изменяемым шагом, что в теории повысит маневренность, но в реальности добавит сложную механику, имеющую свойство изнашиваться и ломаться с последующим дорогостоящим ремонтом.
Также чем больше винт, тем больше его инерция. Если нужна маневренность, лучше выбрать винты с большим шагом или трехлопастные. Они при том же размере создают тягу в 1,2–1,5 раза больше. Понятно, что винты и скорость их вращения нужно подбирать так, чтобы они смогли создать тягу большую, чем вес аппарата.
И наконец, бесколлекторные моторы. У моторов есть ключевой параметр — kV. Это количество оборотов в минуту, которые сделает мотор, на поданный вольт напряжения. Это не мощность мотора, это его, скажем так, «передаточное число». Чем меньше kV, тем меньше оборотов, но выше крутящий момент. Чем больше kV при той же мощности, тем больше оборотов и ниже момент. При выборе мотора ориентируются на то, что в штатном режиме он будет работать при мощности 50% от максимальной. Не стоит думать, что чем kV больше — тем лучше, для коптеров с типичной 3S-батареей рекомендуемое число находится в диапазоне от 700 до 1000 kV.
info
Более прочный материал — дюраль (Д16Т). Практически не гнется, достаточно пружинистый, и его применяют в авиации. Профили из него в ОБИ не продаются, но можно поймать на Митинском рынке на третьем этаже, на рынке ТВЦ «Строй» тоже были.
Питание и контроллеры питания
Капитан подсказывает: чем больше мощность мотора, тем больше батарейка ему нужна. Большая батарейка — это не только емкость (читай, время полета), но и максимальный ток, которая она отдает. Но чем больше батарейка, тем больше и ее вес, что вынуждает скорректировать наши прикидки относительно винтов и моторов. На сегодняшний день все используют литий-полимерные батарейки (LiPo). Они легкие, емкие, с высоким током разрядки. Единственный минус — при отрицательных температурах работают плохо, но если их держать в кармане и подключать непосредственно перед полетом, то во время разряда они сами слегка разогреваются и не успевают замерзнуть. LiPo-элементы вырабатывают напряжение 3,7 В.
При выборе батареи стоит обращать внимание на три ее параметра: емкость, измеряемую в миллиампер-часах, максимальный ток разряда в емкостях аккумулятора (С) и число ячеек (S). Первые два параметра связаны между собой, и при их перемножении ты узнаешь, сколько тока сможет отдавать этот аккумулятор продолжительное время. Например, твои моторы потребляют 10 А каждый и их четыре штуки, а батарея имеет параметры 2200 мА · ч 30/40C, таким образом, коптеру требуется 4 10 A = 40 A, а батарея может выдавать 2,2 A 30 = 66 A или 2,2 А 40 = 88 А в течение 5–10 секунд, что явно будет достаточно для питания аппарата. Также эти коэффициенты напрямую влияют на вес аккумулятора. Внимание! Если тока будет не хватать, то в лучшем случае батарея надуется и выйдет из строя, а в худшем загорится или взорвется; это же может произойти при коротком замыкании, повреждении или неправильных условиях хранения и зарядки, поэтому используй специализированные зарядные устройства, аккумуляторы храни в специальных негорючих пакетах и летай с «пищалкой», которая предупредит о разрядке. Число ячеек (S) указывает на количество LiPo-элементов в батарее, каждый элемент выдает 3,7 В, и, например, 3S-аккумулятор будет отдавать примерно 11,1 В. Стоит обращать внимание на этот параметр, так как от него зависят скорость оборотов моторов и тип используемых регуляторов.
Элементы батареи объединяют последовательно или параллельно. При последовательном включении увеличивается напряжение, при параллельном — емкость. Схему подключения элементов в батарее можно понять по ее маркировке. Например, 3S1P (или просто 3S) — это три последовательно подключенных элемента. Напряжение такой батареи будет 11,1 В. 4S2P — это восемь элементов, две группы, подключенных параллельно по четыре последовательных элемента.
Однако моторы подключаются к батарее не напрямую, а через так называемые регуляторы скорости. Регуляторы скорости (они же «регули» или ESC) управляют скоростью вращения моторов, заставляя твой коптер балансировать на месте или лететь в нужном направлении. Большинство регуляторов имеют встроенный стабилизатор тока на 5 В, от которого можно питать электронику (в частности, «мозг»), можно использовать отдельный стабилизатор тока (UBEC). Выбираются контроллеры скорости исходя из потребления мотором тока, а также возможности перепрошивки. Обычные регули довольно медлительны в плане отклика на поступающий сигнал и имеют множество лишних настроек для коптеростроительства, поэтому их перепрошивают кастомными прошивками SimonK или BLHeli. Китайцы и тут подсуетились, и часто можно встретить регуляторы скорости с уже обновленной прошивкой. Не забывай, что такие регули не следят за состоянием аккумулятора и могут разрядить его ниже 3,0 В на банку, что приведет к его порче. Но в то же время на обычных ESC стоит переключить тип используемого аккумулятора с LiPo на NiMH или отключить уменьшение оборотов при разрядке источника питания (согласно инструкции), чтобы под конец полета внезапно не отключился мотор и твой беспилотник не упал.

Моторы подключаются к регулятору скорости тремя проводами, последовательность не имеет значения, но если поменять любые два из трех проводов местами, то мотор будет вращаться в обратном направлении, что очень важно для коптеров.
Два силовых провода, идущих от регулятора, надо подключить к батарейке. НЕ ПЕРЕПУТАЙ ПОЛЯРНОСТЬ! Вообще, для удобства регуляторы подключают не к самой батарейке, а к так называемому Power Distribution Module — модулю распределения энергии. Это, в общем-то, просто плата, на которой припаяны силовые провода регуляторов, распаяны разветвления для них и припаян силовой кабель, идущий к батарее. Конечно, батарею не надо припаивать, а надо соединить через разъем. Ты же не хочешь перепаивать батарею каждый раз, как она сядет.
Бортовой компьютер и сенсоры
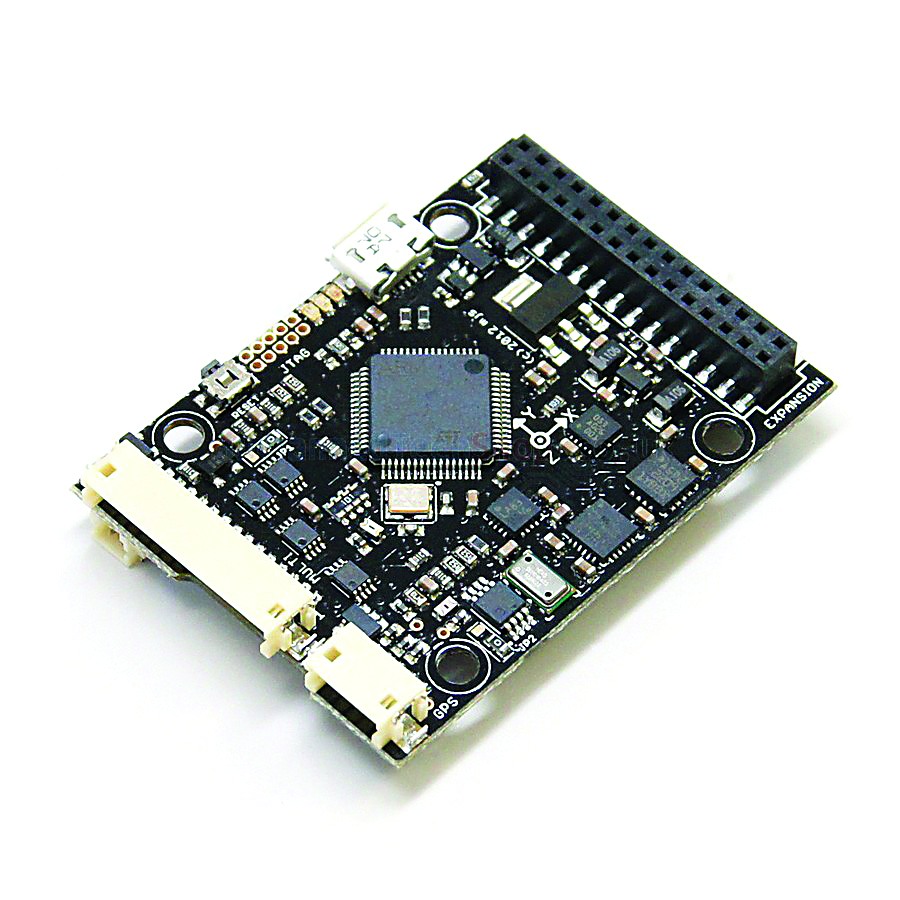
Выбор полетных контроллеров для коптеров очень велик — начиная от простого и дешевого KapteinKUK и нескольких open source проектов под Arduino-совместимые контроллеры до дорогого коммерческого DJI Wookong. Если ты настоящий хакер, то закрытые контроллеры тебя не должны сильно интересовать, в то время как открытые проекты, да еще и основанные на популярной ардуинке, привлекут многих программистов. О возможностях любого полетного контроллера можно судить по используемым в нем датчикам:
Гироскоп позволяет удерживать коптер под определенным углом и стоит во всех контроллерах; акселерометр помогает определить положение коптера относительно земли и выравнивает его параллельно горизонту (комфортный полет); барометр дает возможность удерживать аппарат на определенной высоте. На показания этого датчика очень сильно влияют потоки воздуха от пропеллеров, поэтому стоит прятать его под кусок поролона или губки; компас и GPS вместе добавляют такие функции, как удержание курса, удержание позиции, возврат на точку старта и выполнение маршрутных заданий (автономный полет). К установке компаса стоит подойти внимательно, так как на его показания сильно влияют расположенные рядом металлические объекты или силовые провода, из-за чего «мозги» не смогут определить верное направление движения; сонар или УЗ-дальномер используется для более точного удержания высоты и автономной посадки; оптический сенсор от мышки используется для удержания позиции на малых высотах; датчики тока определяют оставшийся заряд аккумулятора и могут активировать функции возврата на точку старта или приземление.
Сейчас существует три основных открытых проекта: MultiWii, ArduCopter и его портированная версия MegaPirateNG. MultiWii самый простой из них, для запуска требует Arduino с процессором 328p, 32u4 или 1280/2560 и хотя бы одним датчиком-гироскопом. ArduCopter — проект, напичканный всевозможным функционалом от простого висения до выполнения сложных маршрутных заданий, но требует особого железа, основанного на двух чипах ATmega. MegaPirateNG — это клон ArduCopter, который способен запускаться на обычной ардуине с чипом 2560 и минимальным набором датчиков из гироскопа, акселерометра, барометра и компаса. Поддерживает все те же возможности, что и оригинал, но всегда догоняет в развитии.
Продвинутый девяти-канальный пульт
С железом для открытых проектов аналогичная ситуация, как и с рамами для коптера, то есть ты можешь купить готовый контроллер или собрать его самостоятельно с нуля или на основе Arduino. Перед покупкой стоит всегда обращать внимание на используемые в плате датчики, так как развитие технологий не стоит на месте, а старье китайцам как-то надо распродать, к тому же не все сенсоры могут поддерживаться открытыми прошивками.
Наконец, стоит упомянуть еще один компьютер — PX4, отличающийся от клонов Arduino тем, что у него есть UNIX-подобная операционная система реального времени, с шеллом, процессами и всеми делами. Но надо предупредить, что PX4 — платформа новая и довольно сырая. Сразу после сборки не полетит.
Настройка полетных параметров, как и программы настройки, очень индивидуальна для каждого проекта, а теория по ней могла бы занять еще одну статью, поэтому вкратце: почти все прошивки для мультикоптеров основаны на PID-регуляторе, и основной параметр, требующий вмешательства, — пропорциональная составляющая, обозначаемая как P или rateP. Если при взлете твой коптер дергается из стороны в сторону, то это значение надо уменьшать, если же вяло реагирует на внешние воздействия, то наоборот — повышать, остальные нюансы ты сможешь найти в инструкциях и на сайтах разработчиков.
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета. Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах. Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
Управление
Немного про радиоаппаратуру. Сейчас практически все передатчики для летающих моделей работают на частоте 2,4 ГГц. Они достаточно дальнобойные, и этот частотный диапазон не так зашумлен, как, например, 900 МГц. Для полета вообще-то достаточно четырех каналов: газ, рыскание, тангаж, крен. Ну а восьми каналов точно хватит и на что-нибудь еще.
info
Для полетов с камерой обзаведись подвесом, который будет удерживать камеру параллельно горизонту при маневрах, а также поможет управлять наклоном камеры. Большинство контроллеров имеют выходы для стабилизации подвесов с сервоприводом, а также выход для переключателя управления кнопкой спуска камеры.
Комплект обычно состоит из самого пульта и приемника. На приемнике находятся ручки управления и дополнительные кнопки. Обычно выбирают аппаратуру Mode2, когда левый стик управляет газом и поворотом, а правый — наклонами коптера. Все ручки, кроме газа, подпружинены и возвращаются в начальное положение при отпускании. Также стоит обращать внимание на количество каналов. Для беспилотника потребуется четыре канала управления и один канал для переключения режимов полета, кроме того, могут потребоваться дополнительные каналы для управления камерой, для настройки или для особых режимов полетного контроллера. При выборе пульта стоит также учитывать возможность смены радиомодуля, чтобы в будущем его можно было легко обновить.
Квадрокоптер представляет собой летающую платформу на радиоуправлении с четырьмя оснащенными пропеллерами. В состав таких аппаратов включается летающая многороторная платформа. В полете квадрокоптер занимает относительно поверхности земли горизонтальное положение, способен зависнуть над выбранным местом, перемещается в стороны, вверх и вниз. Наличие специального дополнительного оборудования позволяет квадрокоптеру осуществлять практически автономные полеты.
Этот прибор оснащен четырьмя роторами, которые осуществляют вращение диагонально в противоположных направлениях. Роторами управляет процессор, который сообщает данные с трех гироскопов, предназначенных для определения и фиксации положения в пространстве во всех трех плоскостях. Благодаря акселерометру удается занять абсолютно горизонтальное положение. Фиксация квадрокоптера на нужной высоте осуществляется благодаря оснащению бародатчиком. Прибор смещается в пространстве за счет того, что изменяется скорость вращения той или иной двойки моторов. Происходит крен квадрокоптера с его дальнейшим перемещением.

Первые приборы
Это направление начало развиваться в 2006 году. Разработчики из Германии Инго Бускер и Хольген Бусс создали квадрокоптер своими руками. Вокруг него собралось огромное сообщество увлеченных людей — RC-моделистов, программистов, конструкторов. В середине 2007 года квадрокоптеры стали парить и вполне устойчиво перемещаться в воздухе. Такие приборы отличаются от радиоуправляемых вертолетов в положительную сторону благодаря гибкости конструкции и дешевизне. Необходимое для квадрокоптера оборудование можно приобрести, а дальше есть огромный простор для творчества. Помимо этого, в случае падения обычно ремонт такого прибора обходится гораздо дешевле, чем радиоуправляемого вертолета.

Как собрать квадрокоптер своими руками: инструкция
Раму для устройства вполне можно сделать самостоятельно. Для этого потребуется не так уж много материалов. Среди них кусок фанеры 150 х 150 мм, квадратный алюминиевый профиль 14 х 14 мм. Лучи можно прикрутить посредством винтов по диагоналям квадрата. Тонкую алюминиевую ленту можно использовать для создания посадочных лыж и держателя для Каждый луч от центра имеет длину 300 мм, а каждая балка — 250 мм. Отверстия для двигателей на концах лучей можно сделать уже после сборки, разметив все по двигателям.

Радиоуправляемый квадрокоптер: список необходимых запчастей
- Аппаратура Turnigy 9x.
- Управляющая плата.
- Аккумулятор для аппаратуры.
- Силовой аккумулятор на сам квадрокоптер.
- Пропеллеры.
- Зарядные устройства.
Сборка квадрокоптера
Сначала требуется установить управляющую плату, и постараться поместить ее максимально близко к центру платформы. То есть тут лучше все заранее вымерять, чтобы потом не получилось каких-то проблем с балансом и прочих моментов. Отверстия сверлятся сквозь установленную ранее фанеру, прямо в концы алюминиевых лучей. Длинные саморезы по металлу используются для того, чтобы прикрутить плату непосредственно к лучам. Говоря о том, как собрать квадрокоптер своими руками, следует отметить, что лучи не стоит сверлить насквозь, так как тут аккумулятор прилегает к ним максимально плотно.
В непосредственной близости с платой требуется установить приемник. Его можно закрепить посредством суперклея. Если назначение каналов у приемника в точности совпадает с таковыми у управляющей платы, то можно сделать для них упрощенное соединение посредством двух трехжильных шлейфов.

Размещение двигателя
Если рассуждать о том, как сделать квадрокоптер своими руками, то необходимо разметить лучи и просверлить отверстия под двигатель. Расстояние от краев до оси вращения во всех случаях должно быть в точности одинаковым. Отверстие, предназначенное для хвоста вала, который торчит из дна двигателя, необходимо сверлить насквозь на всю ширину квадрата, что позволит видеть, не цепляется ли вал за его края.
Разборки с проводкой
На данном этапе пришло время произвести следующие операции. Сначала делается «паук» из четырех регуляторов скорости, а их провода питания необходимо соединить параллельно посредством специальных переходников. Использовать стоит только в одном месте — где осуществляется подключение батареи к «пауку». Все остальное необходимо спаять, а потом затянуть в термоусадку, так как в полете от вибрации могут случиться разные неожиданности. Теперь нужно подключить сигнальные провода драйверов в соответствии с на управляющей плате.
Когда все будет собрано, можно переходить к тестированию и решению возникающих проблем.

Альтернативный вариант
Первое, что стоит сказать тем, кого интересует, как собрать квадрокоптер своими руками: не стоит экономить на деталях. Существует большое число прошивок, вариантов датчиков, готовых контроллеров, но в нашей статье будет описан вариант использования Arduino Mega, прошивки MegaPirate, а также относительно дешевых датчиков.
Детали
Для начала вам потребуется 4 мотора плюс 1 запасной. Пропеллеры тоже стоит взять с запасом, должно быть минимум 2 стандартных и 2 — обратного вращения. 4 регулятора скорости, плюс несколько запасных. В качестве источника питания не стоит брать один суперёмкий аккумулятор, так как он будет только придавать лишний вес устройству. Правильнее всего предпочесть несколько мелких, чтобы менять их по очереди. Рама должна быть максимально прочной и легкой. Вариант, описанный выше, можно назвать вполне подходящим. В качестве мозгов и датчиков устройства можно использовать программируемый микроконтроллер, плата — AllInOne, акселерометр, гироскоп, управляющая арматура, аккумуляторы, зарядное устройство, а также многое другое. Под последним следует понимать необходимое количество болтиков, винтиков, проводочков, стяжек. Вам потребуются также инструменты для работы, такие как паяльник и принадлежности для работы с ним, дрель, а также умелые руки.
Сборка железа и его настройка
Если все, описанное выше, у вас имеется, то вполне можно начинать процессы сверления, паяния и скручивания. Раму можно делать так же, как было описано ранее, а можно проявить фантазию. Но тут важен лишь один момент: следите, чтобы расстояние от центра до концов лучей было абсолютно одинаковым, при этом пропеллеры во время вращения не должны задевать друг друга и центральную часть из фанеры, так как на ней размещаются все датчики, мозги, а также камера, если вы пожелаете. Установку датчиков следует производить на толстый скотч, резину или силикон, чтобы уменьшить вибрацию. В середине или на концах лучей можно закрепить пенопласт, плотный поролон или резиновые маячки, которые возьмут на себя функции шасси в момент приземления.
Датчики и способы их добыть
Наиболее простым из вариантов можно назвать покупку готовой платы с четырьмя основными датчиками: гироскопом, предназначенным для измерения углового ускорения; акселерометром для измерения гравитации и ускорения; барометром, который определяет высоту и удерживает квадрокоптер на ней; магнитометром, который фиксирует направление движения.
На данный момент в продаже можно найти и такие платы, на которых кроме четырех указанных датчиков есть еще и GPS-приемник, активно используемый для автономных полетов.
Сборка мозгов
Чтобы процесс монтажа стал максимально удобным, стоит все разместить на какой-то плате, выполняющей функции прототипа. Распиновка подключения зависит от типа прошивки, актуальной на момент сбора устройства, поэтому в каждом отдельном случае все следует подключать в соответствии с инструкциями.
Настройка прошивки и загрузка
Найти нужную прошивку на данный момент не представляет сложности, поэтому следует скачать подходящий архив и распаковать его. После того как прошивка в Arduino будет успешно загружена, можно осуществлять закачивание программы настройки, а потом замыкать контакт A5 с GND. Когда программа будет запущена, в меню Option следует выбрать COM-порт Arduino, а в меню Action — AC2 Setup. Важно, чтобы настройка квадрокоптера прошла успешно, а для этого вам необходимо четко следовать инструкциям, которые появятся перед вами после нажатия на огромную кнопку. В одном окошке от вас потребуется двигать ручки на пульте до максимальных и минимальных значений, а в другом окне появится просьба убедиться, что прибор стоит ровно, чтобы верно откалибровать датчики.
Дальнейшие работы

Управление квадрокоптером настраивается после калибровки. После того как вы завершите настройку, A5 с GND можно разомкнуть, а потом в меню найти пункт AC2 Sensor, где вы сможете проверить, правильно ли работают датчики, во вкладке Raw Sensor. Каждый поворот платы с датчиками должен отрабатываться максимально четко, то есть как повернули, так стрелка и становится, если она не дотягивает или переходит нужное значение, то у вас проблемы либо с датчиком, либо с коэффициентами в коде.
Нужно проверить и работу приемника. Делается это в соседней вкладке. Если движение уровней правильное, то при отклонении джойстика газа на 2 секунды вниз вправо должен светиться красный светодиод. При медленном движении того же манипулятора вверх в левом столбце должно происходить примерно одинаковое отклонение уровней.
Результат
Когда все прошло проверку, можно крепить пропеллеры, а потом попробовать взлететь. Для этого квадрокоптер стоит разместить подальше от себя, наклонить вниз и вправо левую ручку, а потом медленно добавить газа. Если прибор взлетел, это очень хорошо, а если он трясется, то придется настраивать PID. Это осуществляется в пункте PID Config. Делается это все в каждой ситуации индивидуально, то есть нет какого-то универсального решения. Теперь вам известно, как собрать квадрокоптер своими руками.

Всем доброго времени суток дорогие друзья! В сегодняшней статье я бы вам хотел показать довольно интересную самоделку , а именно самодельный квадрокоптер. Если вам нравиться авиамоделизм, но собрать самолёт пока для вас довольно сложно, то можно начать с квадрокоптера. В данной статье будет подробно описано, как собрать свой собственный самодельный квадрокоптер. Данная сборка будет, состоять из самых дешёвых комплектующих купленных в китайских магазинах. Конечно, данный микро квадрокоптер не будет хвастаться своими лётными качествами, и ещё какими либо параметрами. Но это вам поможет освоить правильное расположение массы на летающем аппарате и основные настройки, и основные функции квадрокоптера. Ну да ладно, хватит длинных предисловий, погнали!
И так, для данной самоделки нам понадобится:— электродвигатели 4 шт. (2шт CW и 2 шт. CCW продаются комплектом из 4шт.)- подходящие винты для электродвигателей 4 шт.- аккумулятор подходящего размера 3.7V.- кабель зарядки для аккумулятора.- плата управления.- аппаратура для платы управления.- лист ABS пластика (можно использовать коробку от DVD диска).- провода.- терма усадка.
Из инструментов нам также понадобится:— паяльник.- канцелярский нож.- дрель.- сверла.- линейка.- маркер.- двойной скотч.- терма клей.- супер клей.
Вначале нам следует изготовить раму, на которой и будет собираться квадрокоптер. Для изготовления рамы нам следует взять лист пластика, лучше всего подойдёт ABS пластик, так как он очень легкий, что для микро квадрокоптера очень хорошо. Но если такого пластика у вас нет, то отлично подойдет коробка от DVD диска или пищевой контейнер.

Разобравшись с пластиком для рамы, на самом пластике делаем похожие метки, примерно, такие как изображены на фото ниже. Так же следует обратить внимание на отмеченные точки, в этих местах будут установлены электродвигатели, а это значит то, что они должны быть, отмечены максимально точно и симметрично.

Следующий наш шаг это высверливание отверстий под крепление электродвигателей. Это очень важный этап, так как от этого будет зависеть управляемость и общее поведение квадрокоптера. Для высверливания лучше использовать ступенчатое сверло, им будет очень удобно сделать чёткий контур. Но если у вас такого нет, то просто нужно взять сверло подходящего диаметра, то есть диаметр сверла должен совпадать с диаметром электродвигателя.


После чего нам нужно вырезать саму раму. Вырезать мы будем, используя канцелярский нож. Советую делать это с использованием линейки, приложив линейку, сильно надавливая, проводим ножом и отламываем, сгибая пластик. Старайтесь сделать максимально аккуратно.



Перейдем к установке электродвигателей. Это не совсем просто как могло показаться, так как в купленном китайском наборе иметься 2 двигателя формата CW и 2 двигателя CW. Но сначала увеличиваем длину проводов на электродвигателях, так как их длины нам просто будет не достаточно. Припаиваем отрезки проводов 3-4см и изолируем терма усадкой.


На изображение снизу показано как следует устанавливать электродвигатели. Стрелка на изображение указывает на переднюю часть квадрокоптера. И устанавливаем электродвигатели согласно изображению.



Следующий шаг это установка винтов на валы электродвигателей. Тут тоже не все так просто. Если внимательно присмотреться к винту, то на нём можно разглядеть надпись «B1» или «A2». Что означает винт с номиналом «B1» следует устанавливать на электродвигатель с номиналом CW, а винт «A2» на электродвигатель CCW.
Затем возьмём плату управления квадрокоптером и отпаяем от неё все разъёмы для электродвигателей.



Плату управления следует приклеить к раме квадрокоптера строго, так как это указанно на фото ниже. А устанавливать эту плату следует при помощи терма клея, конечно лучше будет плату прикрутить при помощи винтов, но винтики куда тяжелее, чем пара капель терма клея.





Контакты от электродвигателей припаиваем к плате управления точно так же, как это изображено на фото ниже.

Далее вырежем из того же пластика, подходящую по размеру трапецию. Таких заготовок нам понадобиться 2 шт. Они будут выполнять роль, как ножек, так и защиты квадрокоптера.

Вырезанные трапеции следует приклеить в указанные места. Клеить лучше всего на супер клей. Наносим супер клей на трапецию, ждём около одной минуты, прикладываем к раме и ждем схватывания клея.




После чего следует закрепить аккумулятор на корпусе, крепить будем при помощи двойного скотча.



Вставляем разъём от аккумулятора к плате управления, и если загорается синий светодиод, то все в норме.

После включения платы управления следует включить аппаратуру. Пошевелив стиками, аппаратура соединиться с платой управления, и синий светодиод перестанет моргать.


Следует задуматься о зарядке аккумулятора нашего микро квадрокоптера. Для этого возьмём уже готовый USB провод с модулем зарядки. Но так как разъёмы не подошли, автор самоделки просто перепаял разъёмы.